

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:IWR6843AOPEVM 您好,
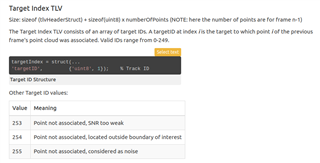
,目标索引tlv的描述如下:
问题1:
如果我明白了,这意味着我们只能知道一个点在下一个帧中属于哪个群集,对吗?
问题2:
群集或目标是否来自基于当前帧的点云tlv (与目标tlv相同)或前一帧的算法?
谢谢你。
此致
木制
您好,
,目标索引tlv的描述如下:
问题1:
如果我明白了,这意味着我们只能知道一个点在下一个帧中属于哪个群集,对吗?
问题2:
群集或目标是否来自基于当前帧的点云tlv (与目标tlv相同)或前一帧的算法?
谢谢你。
此致
木制

