Other Parts Discussed in Thread: IWR1443, IWR1443BOOST
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR1443 您好!
你好。 但愿你一切顺利。
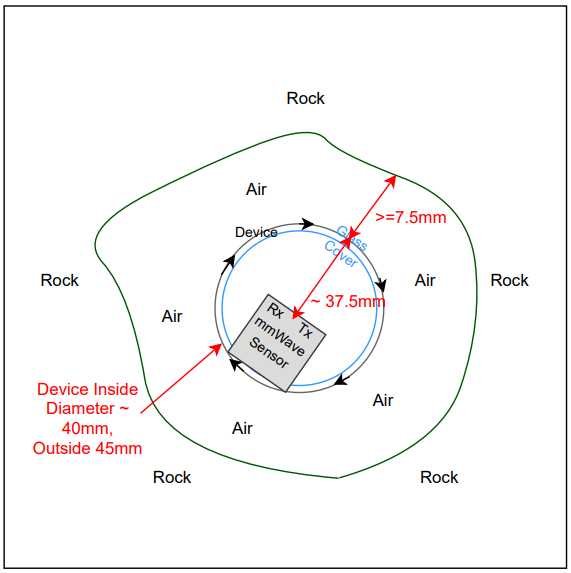
我们的客户希望使用毫米波技术扫描孔洞和裂缝、以创建3D 模型(点云)。 他们考虑使用 IWR1443毫米波传感器。
电子器件的尺寸需要很小、以便能够在小孔/封闭空间(直径小至62mm)中轻松插入和操作。 因此、使用 IWR1443BOOST 开发板为我们的应用测试 IWR1443雷达传感器并开始开发原型既不切实际、也不可行。
因此、他们正在考虑为 IWR1443传感器及其包括天线在内的电路开发自己的定制 PCB。 该板需要尽可能小、并且可以设计为满足最小和最大距离要求。 然后、该传感器板需要与其自己的微控制器(例如 STM32F401RE)连接、以控制 IWR1443并读取范围数据。
我们的客户希望了解开发此类传感器板(硬件)以及将其与微控制器(软件)连接的难度。 https://www.ti.com/product/IWR1443#tech-docs 上是否有任何需要且未找到的文档
感谢您的支持。
此致、
Cedrick