请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1315191/iwrl6432boost-iwrl6432boost
器件型号:IWRL6432BOOST主题中讨论的其他器件:IWRL6432
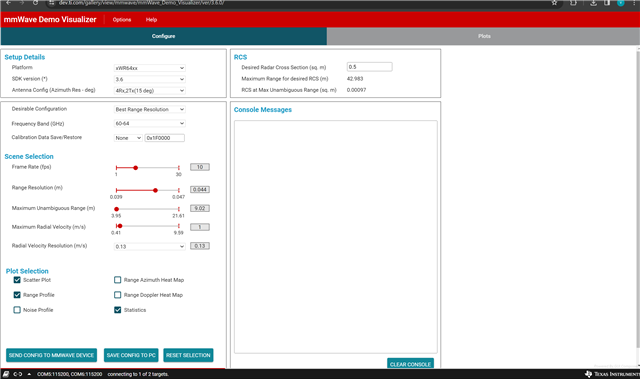
我已经开始了 存在和运动检测演示。
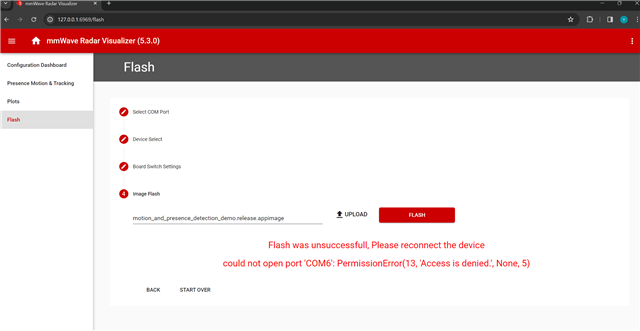
已按照说明从低功耗可视化工具5.3.0.0中刷写 QSPI 图像。
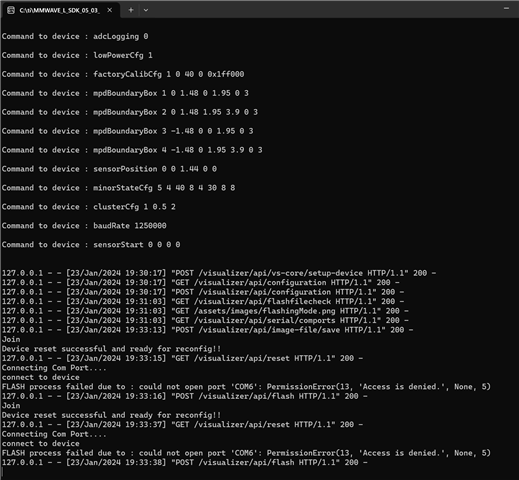
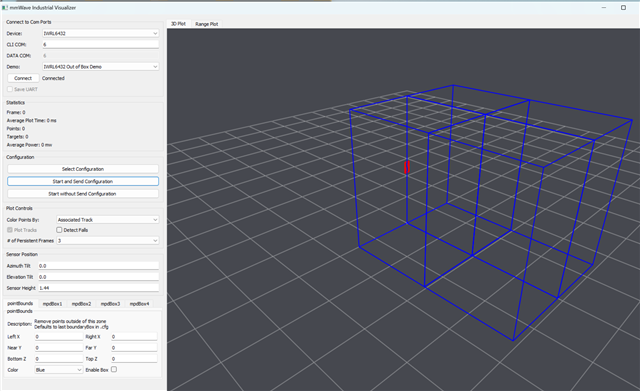
但是、我得到的帧计数器为0、平均功率为0。
您能告知我遗漏了什么?
已确认所有开关均正确。