请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843AOPEVM 主题中讨论的其他器件: DCA1000EVM、 IWR6843AOP
工具与软件:
您好、TI 团队:
我们正在评估 IWR6843AOPEVM 的性能、以便在15' x 15'室内进行静态存在检测和精确的坐标跟踪。 初始测试是使用具有默认配置的3D 人员跟踪二进制文件进行的。 但是、我们遇到了以下问题:
-
坐标的准确度和可靠性: 报告的坐标偶尔会显示不准确、并且检测到的位置的可靠性需要改进。
-
静止人员检测: 当人长时间处于静止状态时、雷达通常无法检测到人员。
-
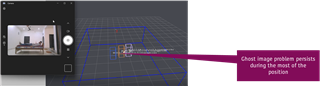
虚假图像: 在测试过程中、虚假图像问题仍然存在、从而导致错误检测。
-
静态目标的减少数据: 当人员变为静态时、我们会观察到 UART 输出上检测到的物体数量减少、这表示处理的来自雷达的数据点较少。
-
最大限度地提高点云检测: 应调整配置(CFG)文件中的哪些特定参数、以更大限度地增加通过 UART 检测到和报告的点云数据点的数量?
- 球坐标中原始数据的二进制文件: 应使用哪个二进制数以球形坐标格式获得最大原始数据(点云数据)、处理量极少。
- 禁用按距离和多普勒分组: 如何仅使用配置参数禁用云点按距离和多普勒进行分组、以更大限度地扩大 UART 上报告的点云数据?
我们非常感谢您提供有关解决这些问题的指导、从而提高适用于我们应用的雷达的精度、可靠性和整体性能。
问候和谢谢
Dileep Sharma