

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:CC1352P 主题中讨论的其他器件:SysConfig
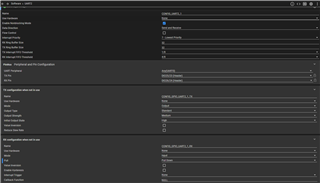
我只是尝试使用 CC1352P1 LP 测试 UART 写入、我已经连接了一个逻辑分析仪以确保我发送的是正确的、似乎收到了帧错误。 我仅尝试使用 uartecho 示例代码 SDK 7.10.02.23发送 ASCII 字符"A"。 下面是 SysConfig、代码和逻辑分析仪捕获的屏幕截图。 导致数据错误的原因是
/*
* Copyright (c) 2020, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ======== uart2echo.c ========
*/
#include <stdint.h>
#include <stddef.h>
/* Driver Header files */
#include <ti/drivers/GPIO.h>
#include <ti/drivers/UART2.h>
/* Driver configuration */
#include "ti_drivers_config.h"
/*
* ======== mainThread ========
*/
void *mainThread(void *arg0)
{
char input;
const char echoPrompt[] = "B\r\n";
UART2_Handle uart;
UART2_Params uartParams;
size_t bytesRead;
size_t bytesWritten = 0;
uint32_t status = UART2_STATUS_SUCCESS;
/* Call driver init functions */
GPIO_init();
/* Configure the LED pin */
GPIO_setConfig(CONFIG_GPIO_LED_0, GPIO_CFG_OUT_STD | GPIO_CFG_OUT_LOW);
/* Create a UART where the default read and write mode is BLOCKING */
UART2_Params_init(&uartParams);
uartParams.baudRate = 115200;
uartParams.parityType = UART2_Parity_NONE;
uartParams.stopBits = UART2_StopBits_1;
uartParams.dataLength = UART2_DataLen_8;
uart = UART2_open(CONFIG_UART2_1, &uartParams);
if (uart == NULL)
{
/* UART2_open() failed */
while (1) {}
}
/* Turn on user LED to indicate successful initialization */
GPIO_write(CONFIG_GPIO_LED_0, CONFIG_GPIO_LED_ON);
UART2_write(uart, echoPrompt, sizeof(echoPrompt), &bytesWritten);
return 0;
}




