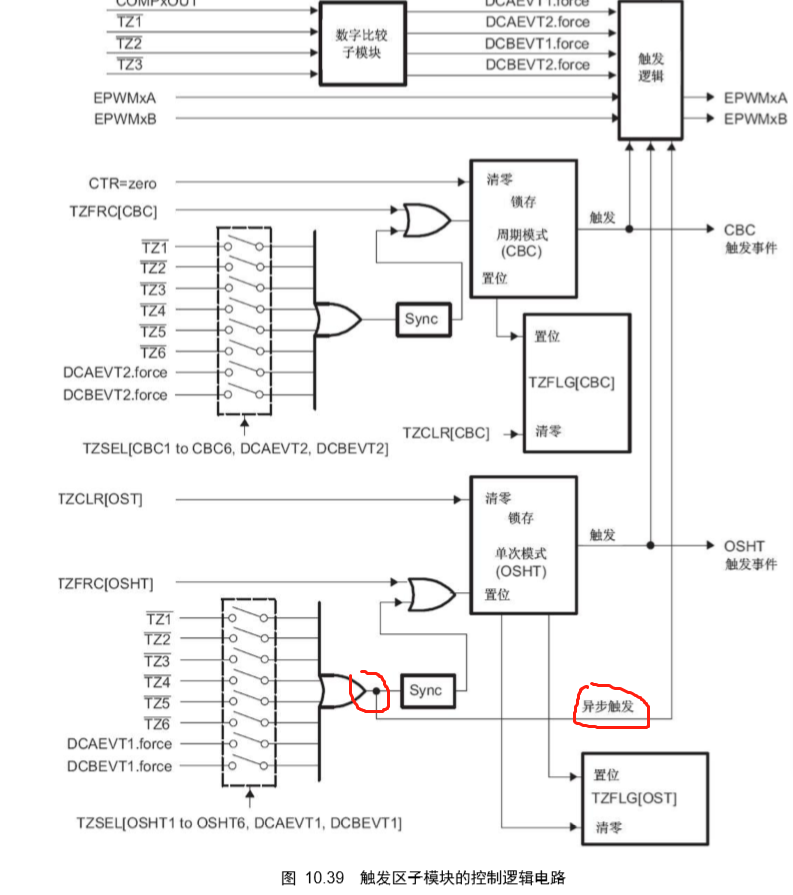
请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?

请问一下,C2000 功能 TZ 触发区,是完全关闭 PWM输出,再次上电时才能使能输出?还是达到触发条件(低电平)关闭PWM输出,在恢复成高电平时则恢复PWM输出?增在使用这个功能做硬件保护,测试发现当低电平时,PWM关闭输出,恢复高电平时,PWM正常输出,这样是否会烧毁电机?