

Other Parts Discussed in Thread: TMS320F28377D
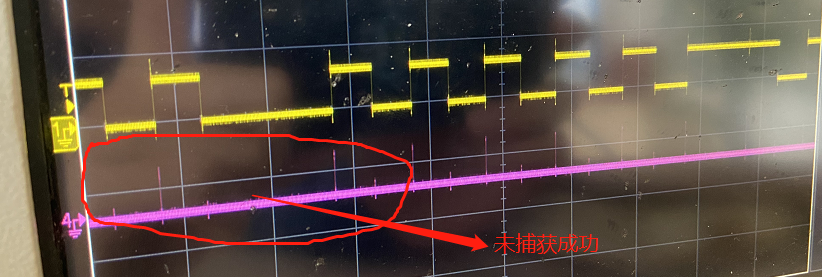
你好,我采用PWM6通过xbar连接到CLB,设置CLB输入下降沿捕获,在输入下降沿捕获过后用示波器测试其波形,发现部分PWM6波形的下降沿并未捕获成功,如下图
...
粉色部分为捕获波形,从波形图上看出,并未捕获成功,但是采用PWM2使用一样的配置,捕获完全正确,请问一下,PWM2和PWM6之间的区别在哪儿,对CLB中的输入滤波器有什么影响?
你好,我采用PWM6通过xbar连接到CLB,设置CLB输入下降沿捕获,在输入下降沿捕获过后用示波器测试其波形,发现部分PWM6波形的下降沿并未捕获成功,如下图
...
粉色部分为捕获波形,从波形图上看出,并未捕获成功,但是采用PWM2使用一样的配置,捕获完全正确,请问一下,PWM2和PWM6之间的区别在哪儿,对CLB中的输入滤波器有什么影响?


 这就是上图,黄色波形是其他的无关波形。
这就是上图,黄色波形是其他的无关波形。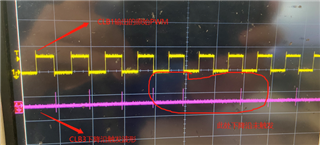
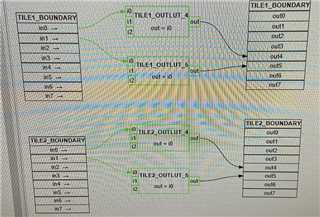 这是CLB的配置。
这是CLB的配置。