Part Number: LAUNCHXL-F28379D
Other Parts Discussed in Thread: C2000WARE
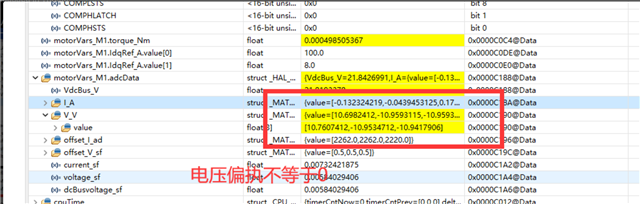
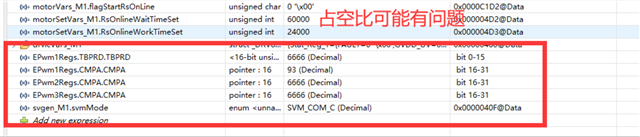
我的开发板是 LaunchXL-F28379D,驱动板是 DEV8301REVB。 同过指南移植了C2000motorcontrol4.0.0 中电机实验室,现在遇到到问题是没有加入编码器的情况下 在MOTOR1_ENC下电机竟然可以运行起来,在MOTOR1_FAST中 上电后设置motorVas_M1.flagRunIdentAndOnLine=1后,电机发热严重,并且电机产生了烟。这种情况是为什么哪? void main(void)
{
// hal.c 初始化驱动器HAL句柄。主要是分配句柄空间等
halHandle = HAL_init(&hal, sizeof(hal));
// hal.c 设置驱动器HAL参数。主要对初始化后的句柄进行具体的配置,配置包括中断、定时器、时钟、GPIO、ADC
HAL_setParams(halHandle);
// 关联motorHandle_M1和motorVars_M1
motorHandle_M1 = (MOTOR_Handle)(&motorVars_M1);
// false - 使能电机参数辨识, true - 禁用电机参数辨识
userParams_M1.flag_bypassMotorId = false;
// motor1_drive.c 初始化电机控制句柄。包括电机数量、电机设置参数句柄、用户设置参数句柄、电机HAL层控制句柄以及驱动IC参数句柄
initMotor1Handles(motorHandle_M1);
// motor1_drive.c 初始化电机控制参数句柄。主要对电机控制参数句柄、设置参数句柄、用户参数句柄进行具体设置。
initMotor1CtrlParameters(motorHandle_M1);
// 初始化CPU使用模块
cpuTimeHandle = CPU_TIME_init(&cpuTime, sizeof(cpuTime));
CPU_TIME_reset(cpuTimeHandle);
//系统使能标志位置位
systemVars.flagEnableSystem = true;
// 初始化中断向量表
HAL_initIntVectorTable(halHandle);
// 使能用于控制的ADC/PWM中断
// 使能触发DMA的中断
HAL_enableCtrlInts(halHandle);
// 电机偏移校准标志位使能
motorVars_M1.flagEnableOffsetCalc = true;
// motor1_drive.c 使用滤波器运行电机的偏移校准
runMotor1OffsetsCalculation(motorHandle_M1);
// 使能全局中断
HAL_enableGlobalInts(halHandle);
// 使能调试中断
HAL_enableDebugInt(halHandle);
// 设置电源延时等待时间
systemVars.powerRelayWaitTime_ms = POWER_RELAY_WAIT_TIME_ms;
// 等待系统使能标志位被置位
while(systemVars.flagEnableSystem == false)
{
if(HAL_getCPUTimerStatus(halHandle, HAL_CPU_TIMER0))
{
HAL_clearCPUTimerFlag(halHandle, HAL_CPU_TIMER0);
systemVars.timerBase_1ms++;
if(systemVars.timerBase_1ms > systemVars.powerRelayWaitTime_ms)
{
systemVars.flagEnableSystem = true;
systemVars.timerBase_1ms = 0;
}
}
}
// 如果系统使能标志位被置位,则一直循环本while
while(systemVars.flagEnableSystem == true)
{
// loop while the enable system flag is true
systemVars.mainLoopCnt++;
// 1ms time base:1ms运行一次本段代码?
if(HAL_getCPUTimerStatus(halHandle, HAL_CPU_TIMER0))
{
// 清除CPU时钟标志位
HAL_clearCPUTimerFlag(halHandle, HAL_CPU_TIMER0);
// 反转LED状态
systemVars.counterLED++;
if(systemVars.counterLED > (uint16_t)(LED_BLINK_FREQ_Hz * 1000))
{
HAL_toggleLED(halHandle, HAL_GPIO_LED2C);
systemVars.counterLED = 0;
}
systemVars.timerBase_1ms++;
// 每1ms运行其中的一段代码,5ms循环一次
switch(systemVars.timerBase_1ms)
{
case 1:
// 电机保护检查
runMotorMonitor(motorHandle_M1);
break;
case 2:
// 计算
calculateRMSData(motorHandle_M1);
break;
case 3:
break;
case 4:
// 计算电机保护值:过流保护阈值
calcMotorOverCurrentThreshold(motorHandle_M1);
break;
case 5:
// 1ms计数清零
systemVars.timerBase_1ms = 0;
systemVars.timerCnt_5ms++;
break;
}
}
// 运行电机控制函数
runMotor1Control(motorHandle_M1);
}
// 禁用PWM
HAL_disablePWM(motorHandle_M1->halMtrHandle);
}
r