

Part Number: LAUNCHXL-F28379D
Other Parts Discussed in Thread: DRV8301
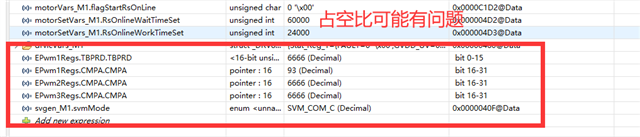
我用的是主控LAUNCHXL-F2837D 驱动板是drv8301—REVB 在进行用户指南移植过后,在根据指南中第一级增量构建中三相PWM占空比不等于50% CMPA不等于TBPRD的一半,还有电压偏执不等于0 。为什么?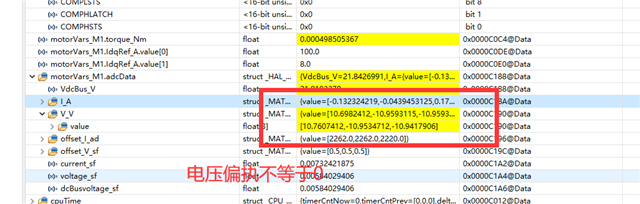
Part Number: LAUNCHXL-F28379D
Other Parts Discussed in Thread: DRV8301
我用的是主控LAUNCHXL-F2837D 驱动板是drv8301—REVB 在进行用户指南移植过后,在根据指南中第一级增量构建中三相PWM占空比不等于50% CMPA不等于TBPRD的一半,还有电压偏执不等于0 。为什么?


 ,我个人也是也认为i是pwm配置出现了问题,我去掉驱动器,只用控制板去测量引脚输出的pwm的电压显示为0。
,我个人也是也认为i是pwm配置出现了问题,我去掉驱动器,只用控制板去测量引脚输出的pwm的电压显示为0。