Part Number: TMS320F28388D
大家好,
我在使用IPC进行CM4到CPU1通信时遇到一些问题,我使用下面帖子回答的用例进行修改
原代码内容:
//#############################################################################
//
// FILE: ipc_ex2_msgqueue_cm.c
//
// TITLE: IPC example with interrupt and message queue
//
//! \addtogroup driver_cm_c28x_dual_example_list
//! <h1> IPC message passing example with interrupt and message queue </h1>
//!
//! This example demonstrates how to configure IPC and pass information from
//! C28x to CM core with message queues.
//! It is recommended to run the C28x1 core first, followed by the CM core.
//!
//! \b External \b Connections \n
//! - None.
//!
//! \b Watch \b Variables \n
//! - None.
//!
//
//#############################################################################
// $Copyright:
// Copyright (C) 2022 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//###########################################################################
//
// Included Files
//
#include "cm.h"
#include "ipc.h"
//
// Defines
//
#define IPC_CMD_READ_MEM 0x1001
#define IPC_CMD_RESP 0x2001
#define TEST_PASS 0x5555
#define TEST_FAIL 0xAAAA
IPC_MessageQueue_t messageQueue;
#pragma DATA_SECTION(CMData, "MSGRAM_CM_TO_CPU1")
uint32_t CMData[10];
//
// IPC ISR for Flag 1
// C28x core sends data with message queue using Flag 0
//
__interrupt void IPC_ISR1()
{
int i;
IPC_Message_t TxMsg, RxMsg;
bool status = false;
//
// Read the message from the message queue
//
IPC_readMessageFromQueue(IPC_CM_L_CPU1_R, &messageQueue, IPC_ADDR_CORRECTION_ENABLE,
&RxMsg, IPC_NONBLOCKING_CALL);
if(RxMsg.command == IPC_CMD_READ_MEM)
{
status = true;
//
// Read and compare data
//
for(i=0; i<RxMsg.dataw1; i++)
{
if((*(uint32_t *)RxMsg.address + i) != i)
status = false;
}
}
//
// Send response message
//
TxMsg.command = IPC_CMD_RESP;
TxMsg.address = (uint32_t)CMData;
TxMsg.dataw1 = 10;
TxMsg.dataw2 = 1;
IPC_sendMessageToQueue(IPC_CM_L_CPU1_R, &messageQueue, IPC_ADDR_CORRECTION_ENABLE,
&TxMsg, IPC_NONBLOCKING_CALL);
//
// Acknowledge the flag
//
IPC_ackFlagRtoL(IPC_CM_L_CPU1_R, IPC_FLAG1);
}
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
CM_init();
//
// Clear any IPC flags if set already
//
IPC_clearFlagLtoR(IPC_CM_L_CPU1_R, IPC_FLAG_ALL);
//
// Enable IPC interrupts
//
IPC_registerInterrupt(IPC_CM_L_CPU1_R, IPC_INT1, IPC_ISR1);
//
// Initialize message queue
//
IPC_initMessageQueue(IPC_CM_L_CPU1_R, &messageQueue, IPC_INT1, IPC_INT1);
//
// Synchronize both the cores.
//
IPC_sync(IPC_CM_L_CPU1_R, IPC_FLAG31);
int i;
for(i=0; i<10; i++)
{
CMData[i] = i+11;
}
//
// Loop forever. Wait for IPC interrupt
//
while(1);
}
//
// End of File
//
//#############################################################################
//
// FILE: ipc_ex2_msgqueue_c28x1.c
//
// TITLE: IPC example with interrupt and message queue
//
//! \addtogroup driver_cm_c28x_dual_example_list
//! <h1> IPC message passing example with interrupt and message queue </h1>
//!
//! This example demonstrates how to configure IPC and pass information from
//! C28x to CM core with message queues.
//! It is recommended to run the C28x1 core first, followed by the CM core.
//!
//! \b External \b Connections \n
//! - None.
//!
//! \b Watch \b Variables \n
//! - pass
//!
//
//#############################################################################
// $Copyright:
// Copyright (C) 2022 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//###########################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
//
// Defines
//
#define IPC_CMD_READ_MEM 0x1001
#define IPC_CMD_RESP 0x2001
#define TEST_PASS 0x5555
#define TEST_FAIL 0xAAAA
#pragma DATA_SECTION(CPU1Data, "MSGRAM_CPU_TO_CM")
uint32_t CPU1Data[10];
IPC_MessageQueue_t messageQueue;
IPC_Message_t TxMsg, RxMsg;
uint32_t pass;
__interrupt void IPC_ISR1()
{
int i;
bool status = false;
//
// Read the message from the message queue
//
IPC_readMessageFromQueue(IPC_CPU1_L_CM_R, &messageQueue, IPC_ADDR_CORRECTION_ENABLE,
&RxMsg, IPC_NONBLOCKING_CALL);
if(RxMsg.command == IPC_CMD_RESP)
{
status = true;
for(i=0; i<RxMsg.dataw1; i++)
{
if((*(uint32_t *)RxMsg.address + i) != i+11)
status = false;
}
}
//
// Send response message
//
TxMsg.command = IPC_CMD_READ_MEM;
TxMsg.address = (uint32_t)CPU1Data;
TxMsg.dataw1 = 10; // Using dataw1 as data length
TxMsg.dataw2 = 1; // Message identifier
IPC_sendMessageToQueue(IPC_CPU1_L_CM_R, &messageQueue, IPC_ADDR_CORRECTION_ENABLE,
&TxMsg, IPC_NONBLOCKING_CALL);
//
// Acknowledge the flag
//
IPC_ackFlagRtoL(IPC_CPU1_L_CM_R, IPC_FLAG1);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP11);
}
//
// Main
//
void main(void)
{
int i;
//
// Initialize device clock and peripherals
//
Device_init();
//
// Boot CM core
//
#ifdef _FLASH
Device_bootCM(BOOTMODE_BOOT_TO_FLASH_SECTOR0);
#else
Device_bootCM(BOOTMODE_BOOT_TO_S0RAM);
#endif
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Clear any IPC flags if set already
//
IPC_clearFlagLtoR(IPC_CPU1_L_CM_R, IPC_FLAG_ALL);
//
// Enable IPC interrupts
//
IPC_registerInterrupt(IPC_CPU1_L_CM_R, IPC_INT1, IPC_ISR1);
//
// Initialize message queue
//
IPC_initMessageQueue(IPC_CPU1_L_CM_R, &messageQueue, IPC_INT1, IPC_INT1);
//
// Synchronize both the cores
//
IPC_sync(IPC_CPU1_L_CM_R, IPC_FLAG31);
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
//
// Fill in the data to be sent
//
for(i=0; i<10; i++)
{
CPU1Data[i] = i;
}
//
// Update the message
//
TxMsg.command = IPC_CMD_READ_MEM;
TxMsg.address = (uint32_t)CPU1Data;
TxMsg.dataw1 = 10; // Using dataw1 as data length
TxMsg.dataw2 = 1; // Message identifier
//
// Send message to the queue
// Since C28x and CM does not share the same address space for shared RAM,
// ADDRESS_CORRECTION is enabled
//
IPC_sendMessageToQueue(IPC_CPU1_L_CM_R, &messageQueue, IPC_ADDR_CORRECTION_ENABLE,
&TxMsg, IPC_NONBLOCKING_CALL);
//
// End of example. Loop forever
//
while(1);
}
//
// End of File
//
修改内容:
1、我在CM4核的while循环上不断发送消息至CPU1,发现CPU1无法重复进入中断,请问是什么原因造成的?
ipc_ex2_msgqueue_cm.c
//
// End of example. Loop forever
//
while(1)
{
//
// Send response message
//
TxMsg.command = IPC_CMD_RESP;
TxMsg.address = (uint32_t)CMData;
TxMsg.dataw1 = 10;
TxMsg.dataw2 = 1;
IPC_sendMessageToQueue(IPC_CM_L_CPU1_R, &messageQueue, IPC_ADDR_CORRECTION_ENABLE,
&TxMsg, IPC_NONBLOCKING_CALL);
}
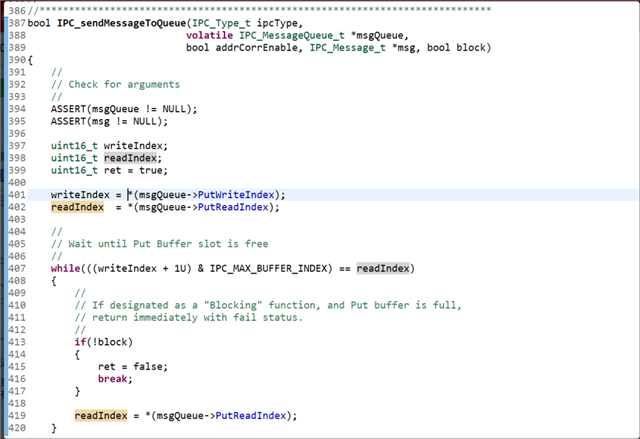
2、想问下消息队列的阻塞方式和非阻塞方式该如何理解?