This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
Original question:
TMS320F28335: 关于死区时间设置
Part Number: TMS320F28335
请问这个问题有什么解释吗?
不好意思之前漏掉了。
有两点我需要再确认一下:
1. 初始化ePWM模块的流程是怎样的?也就是说在初始化之前有没有关闭ePWM模块的外设时钟,然后在配置完成后再打开?
2. 试一下在配置的最后再手动清一下TBCTR。
void Init_EPWM() { EALLOW; SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Disable TBCLK within the EPWM EDIS; Init_epwm1(); Init_epwm2(); // Init_epwm3(); EALLOW; SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; // Enable TBCLK within the EPWM EDIS; } //======================================================= //函数名称: Init_epwm1() //功能: 初始化EPWM1为带死区互补输出(AHC)的可变频率的PWM 逆变级 //输入: //返回: //备注: //======================================================= void Init_epwm1(void) { EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up-down EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // TBCLK = EPWMCLK /(HSPCLKDIV× CLKDIV) EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1; // TBCLK = 150M/(1*1)= 150MHz EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Enable phase loading EPwm1Regs.TBCTL.bit.PRDLD = TB_SHADOW; // TBPRD is loaded from its shadow register EPwm1Regs.TBPRD = EPWM_PRD; // Set timer period (100kHz) EPwm1Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0 EPwm1Regs.TBCTR = 0x0000; // Clear counter EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO; // 同步信号输出选择TBCTR=0 EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // CMPA Shadow mode EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on CTR = 0 EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW; // CMPA Shadow mode EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // Load on CTR = 0 EPwm1Regs.CMPA.half.CMPA = 2*D* EPWM_PRD; // Initial duty EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR; // TBCTR = CMPA on Down Count:Clear EPwm1Regs.AQCTLA.bit.CAD = AQ_NO_ACTION; // TBCTR = CMPA on Up Count:NO ACTION EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET; // TBCTR = 0 on Up Count:Set // EPwm1Regs.AQCTLB.bit.CAU = AQ_CLEAR; // TBCTR = CMPA on Down Count:Clear // EPwm1Regs.AQCTLB.bit.CAD = AQ_NO_ACTION; // TBCTR = CMPA on Up Count:NO ACTION // EPwm1Regs.AQCTLB.bit.ZRO = AQ_SET; // T BCTR = 0 on Up Count:Set EPwm1Regs.AQCTLB.bit.CAU = AQ_NO_ACTION; EPwm1Regs.AQCTLB.bit.CAD = AQ_CLEAR; EPwm1Regs.AQCTLB.bit.ZRO = AQ_SET; //DELAY_US(100000); EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; //0x3 MODE2 AHC high level delay (AHC)死区双边使能 EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; //0x2 A不反转,B反转 EPwm1Regs.DBCTL.bit.IN_MODE = DBA_RED_DBB_FED; EPwm1Regs.DBRED = EPWM1_DBRED; // 上升沿延时 注意:只有10位,最大1023 EPwm1Regs.DBFED = EPWM1_DBFED; // 下降沿延时 注意:只有10位,最大1023 EALLOW; EPwm1Regs.TZSEL.bit.OSHT1 = 1; //单次触发联防 // EPwm1Regs.TZSEL.bit.OSHT2 = 1; //单次触发联防 EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO; //强制A低电平 EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO; //强制B低电平 // // // Enable TZ interrupt // EPwm1Regs.TZEINT.bit.OST = 1; EDIS; // EALLOW; EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; //过零点触发中断 EPwm1Regs.ETSEL.bit.INTEN = 1; //使能中断 EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; //每次过零产生中断 EDIS; //计数器计数等于0时触发ADC转换 // EPwm1Regs.ETSEL.bit.SOCASEL = ET_CTR_ZERO; // Counter = 0 // EPwm1Regs.ETPS.bit.SOCAPRD = ET_1ST; // Generate SOCA pulse on 1st event // EPwm1Regs.ETCLR.bit.SOCA = 1; // Clear SOCA flag // EPwm1Regs.ETSEL.bit.SOCAEN = 1; // Enable SOCA // EPwm1Regs.ETCLR.bit.INT = 1; // Clear INT flag // EPwm1Regs.ETSEL.bit.INTEN = 0; // Disable INT } void Init_epwm2(void) { EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up-down EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV1; // TBCLK = EPWMCLK /(HSPCLKDIV× CLKDIV) EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV1; // TBCLK = 150M/(1*1)= 150MHz EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE; // Enable phase loading EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW; // TBPRD is loaded from its shadow register EPwm2Regs.TBPRD = EPWM_PRD; // Set timer period (4.8kHz) EPwm2Regs.TBPHS.half.TBPHS = 0; EPwm2Regs.TBCTR = 0x0000; // Clear counter EPwm2Regs.TBCTL.bit.SYNCOSEL = TB_SYNC_IN; // 同步信号输出选择外部同步信号输入EPWMxSYNCO EPwm2Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW; // CMPA Shadow mode EPwm2Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on CTR = 0 EPwm2Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW; // CMPA Shadow mode EPwm2Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO; // Load on CTR = 0 EPwm2Regs.CMPA.half.CMPA = 2*D* EPWM_PRD; // Initial duty // EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR; // TBCTR = CMPA on Down Count:Clear // EPwm2Regs.AQCTLA.bit.CAD = AQ_NO_ACTION; // TBCTR = CMPA on Up Count:NO ACTION // EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET; // TBCTR = 0 on Up Count:Set // // EPwm2Regs.AQCTLB.bit.CAU = AQ_NO_ACTION; // EPwm2Regs.AQCTLB.bit.CAD = AQ_CLEAR; // EPwm2Regs.AQCTLB.bit.ZRO = AQ_SET; // // EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; //0x3 MODE2 AHC high level delay (AHC)死区双边使能 // EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; //0x1 A不反转,B反转 // EPwm2Regs.DBCTL.bit.IN_MODE = DBA_RED_DBB_FED; // EPwm2Regs.AQCTLA.bit.CAU = AQ_NO_ACTION; // TBCTR = CMPA on Down Count:Clear // EPwm2Regs.AQCTLA.bit.CAD = AQ_SET; // TBCTR = CMPA on Up Count:Set // EPwm2Regs.AQCTLA.bit.ZRO = AQ_CLEAR; // // EPwm2Regs.AQCTLB.bit.CAU = AQ_SET; // EPwm2Regs.AQCTLB.bit.CAD = AQ_NO_ACTION; // EPwm2Regs.AQCTLB.bit.ZRO = AQ_CLEAR; EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR; // TBCTR = CMPA on Down Count:Clear EPwm2Regs.AQCTLA.bit.CAD = AQ_NO_ACTION; // TBCTR = CMPA on Up Count:NO ACTION EPwm2Regs.AQCTLA.bit.ZRO = AQ_SET; // TBCTR = 0 on Up Count:Set // EPwm2Regs.AQCTLA.bit.CAU = AQ_CLEAR; // TBCTR = CMPA on Down Count:Clear // EPwm2Regs.AQCTLA.bit.CAD = AQ_NO_ACTION; // TBCTR = CMPA on Up Count:NO ACTION // EPwm2Regs.AQCTLA.bit.ZRO = AQ_NO_ACTION; // TBCTR = 0 on Up Count:Set // // EPwm2Regs.AQCTLB.bit.CAU = AQ_CLEAR; // EPwm2Regs.AQCTLB.bit.CAD = AQ_NO_ACTION; // EPwm2Regs.AQCTLB.bit.ZRO = AQ_NO_ACTION; EPwm2Regs.AQCTLB.bit.CAU = AQ_NO_ACTION; EPwm2Regs.AQCTLB.bit.CAD = AQ_CLEAR; EPwm2Regs.AQCTLB.bit.ZRO = AQ_SET; EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; //0x3 MODE2 AHC high level delay (AHC)死区双边使能 EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; //0x2 A不反转,B反转 // EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HI; //0x2 A不反转,B不反转 EPwm2Regs.DBCTL.bit.IN_MODE = DBA_RED_DBB_FED; // EPwm2Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; //0x3 MODE2 AHC high level delay (AHC)死区双边使能 // EPwm2Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; //0x2 // EPwm2Regs.DBCTL.bit.IN_MODE = DBA_RED_DBB_FED; EPwm2Regs.DBRED = EPWM2_DBRED; // 上升沿延时 上升死区为0.5%的占空比 0.5%个TBPRD(150MHz) 注意:只有10位,最大1023 EPwm2Regs.DBFED = EPWM2_DBFED; // 下降沿延时 下降死区为0.5%的占空比 0.5%个TBPRD(150MHz) 注意:只有10位,最大1023 EALLOW; EPwm2Regs.TZSEL.bit.OSHT1 = 1; EPwm2Regs.TZCTL.bit.TZA = TZ_FORCE_LO; EPwm2Regs.TZCTL.bit.TZB = TZ_FORCE_LO; //Enable TZ interrupt // EPwm2Regs.TZEINT.bit.CBC =1; EPwm2Regs.TZEINT.bit.OST = 1; EDIS; // EALLOW; // //EPwm1Regs.AQCSFRC.all=0x05; //强制低 // EPwm2Regs.AQCSFRC.all=0x05; //强制低 // // EPwm3Regs.AQCSFRC.all=0x05; // // EPwm6Regs.AQCSFRC.all=0x05; // EPwm2Regs.DBCTL.bit.POLSEL = 0x0; //不反转极性 // EDIS; }
如图上代码所示,Init_EPWM()为PWM初始化函数,其流程是先关闭TBCLKSYNC时基时钟,再进行配置,配置结束后再开启时基时钟。另外你说的外设时钟,不知道是不是这片代码。这片代码在工程文件的DSP2833x_SysCtrl.c源文件里,并未改动。
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; // Disable TBCLK within the ePWM SysCtrlRegs.PCLKCR1.bit.EPWM1ENCLK = 1; // ePWM1 SysCtrlRegs.PCLKCR1.bit.EPWM2ENCLK = 1; // ePWM2 SysCtrlRegs.PCLKCR1.bit.EPWM3ENCLK = 1; // ePWM3 SysCtrlRegs.PCLKCR1.bit.EPWM4ENCLK = 1; // ePWM4 SysCtrlRegs.PCLKCR1.bit.EPWM5ENCLK = 1; // ePWM5 SysCtrlRegs.PCLKCR1.bit.EPWM6ENCLK = 1; // ePWM6 SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; // Enable TBCLK within the ePWM
2.配置完后清除了TBCLR计数器,还是有这个现象。
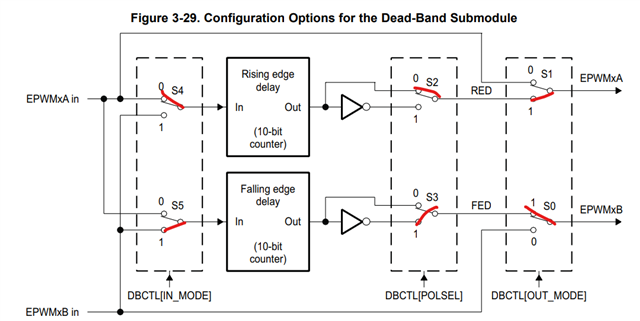
3,这个现象出现在在翻转的那一路PWM上,不论PWM动作模块怎么配置,只要在死区模块中把该路PWM翻转,PWM输出不论输出高电平,还是低电平,第一个脉冲时钟就有一段高电平。这段高电平过后就是正常的PWM波。这个现象也出现在直接购买的28335开发板上。
我实验一下
我复现到了你描述的现象
为了方便之后查看,我把DB的配置发上来:
另外为了方便查看,我把你之前上传的代码的格式改了一下
对,是这种配置,这个现象会导致我们电路会发生保护。而且EPWM1B这段高电平持续时间高一些,EPWM2B高电平持续时间低一些。
关键配置:
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; EPwm1Regs.TBCTR = 0x0000; EPwm1Regs.CMPA.half.CMPA = 2 * D * EPWM_PRD; EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR; EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET; EPwm1Regs.AQCTLB.bit.CAD = AQ_CLEAR; EPwm1Regs.AQCTLB.bit.ZRO = AQ_SET; EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; //B reverse EPwm1Regs.DBCTL.bit.IN_MODE = DBA_RED_DBB_FED; EPwm1Regs.DBRED = EPWM1_DBRED; EPwm1Regs.DBFED = EPWM1_DBFED;
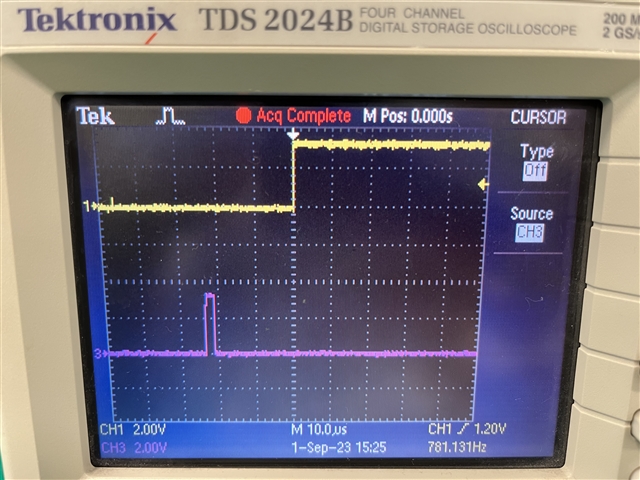
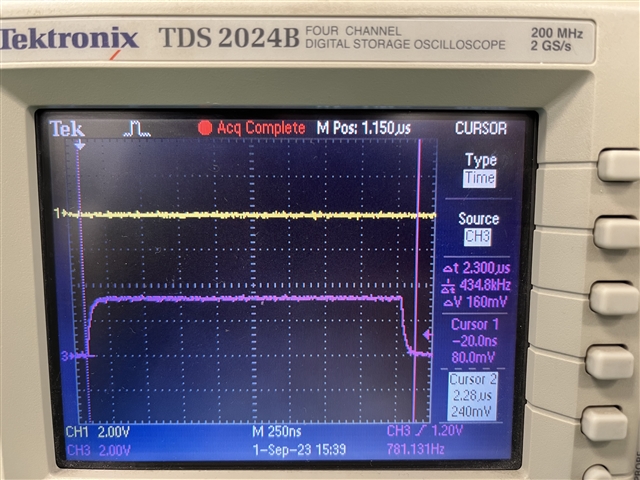
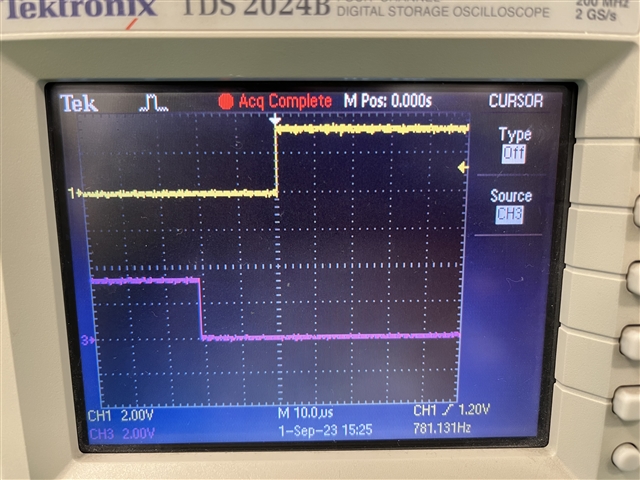
实验结果:
第1、第2个波形分别是第一个PWM波之前的高电平脉冲以及它的宽度;
第3个波形是之后的PWM波。
黄色的是1A,紫色的是1B。
不难看出,1B脉冲的下降沿 到 1A的上升沿 之间是设定的1A的上升沿延迟。
根据实验推断的原因是DB模块中存在延时。
1B的配置是0处置1,CAD处清0;但是加入了翻转,也就是说实际上是在CAD附近置1,紧接着在0处清0。
上面提到的DB模块中的延时为低电平,是在第一个0处清零(翻转前是置高)之前,被翻转了上去,所以产生了脉冲。
谢谢回答,您的意思是PWM信号在经过死区模块中翻转的那一部分,即DBCTL(POLSEL)这个部分存在延迟吗?这个延迟时间也不是固定的,那这个问题是固有的,没办法消除这段高电平是吗,
目前不确定具体是DB中的哪一部分存在延迟;数据手册中确实也没有提到。有可能存在于极性翻转这里;也有可能不是,因为翻转之后才会在波形中体现出来。
这个我需要再实验以及与其他工程师讨论一下。
目前最快的解决办法就是先不要用极性翻转,通过不同的动作来实现A路与B路之间的互补。