hi,every one:
我最近在学习如何使用硬件I2C通讯来读取MPU6050,
但是遇到了一些问题:
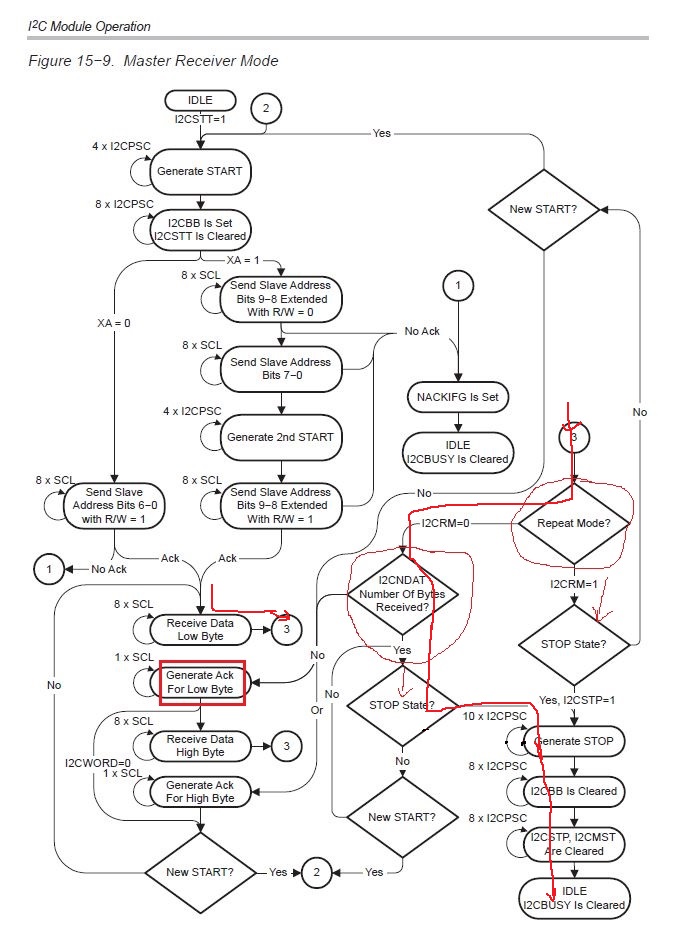
(1)MPU6050的读时序中,结束位产生之前需要产生一个NACK位,也就是将SCL拉高,翻了几遍手册,还是摸不着头脑该怎样产生这个NACK位,所以特来求助一下大家。
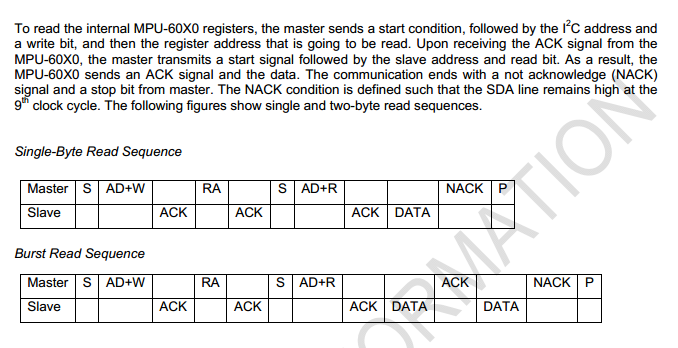
(2)同样是MPU6050的写时序,将I2CSTT开始位置位后并顺利发送了地址和第一帧数据,如果我想继续发送一帧数据,是不是需要要将TXRDYIFG置位?
谢谢!
2017年4月30日23:48:18
TAMK
hi,every one:
我最近在学习如何使用硬件I2C通讯来读取MPU6050,
但是遇到了一些问题:
(1)MPU6050的读时序中,结束位产生之前需要产生一个NACK位,也就是将SCL拉高,翻了几遍手册,还是摸不着头脑该怎样产生这个NACK位,所以特来求助一下大家。
(2)同样是MPU6050的写时序,将I2CSTT开始位置位后并顺利发送了地址和第一帧数据,如果我想继续发送一帧数据,是不是需要要将TXRDYIFG置位?
谢谢!
2017年4月30日23:48:18
TAMK