

期间用了msp430提供的历程 ,下载运行也会停在while (!(UCB0IFG & UCTXIFG)),用超时机制跳过,重新开始 ,抓取到的波形如下:
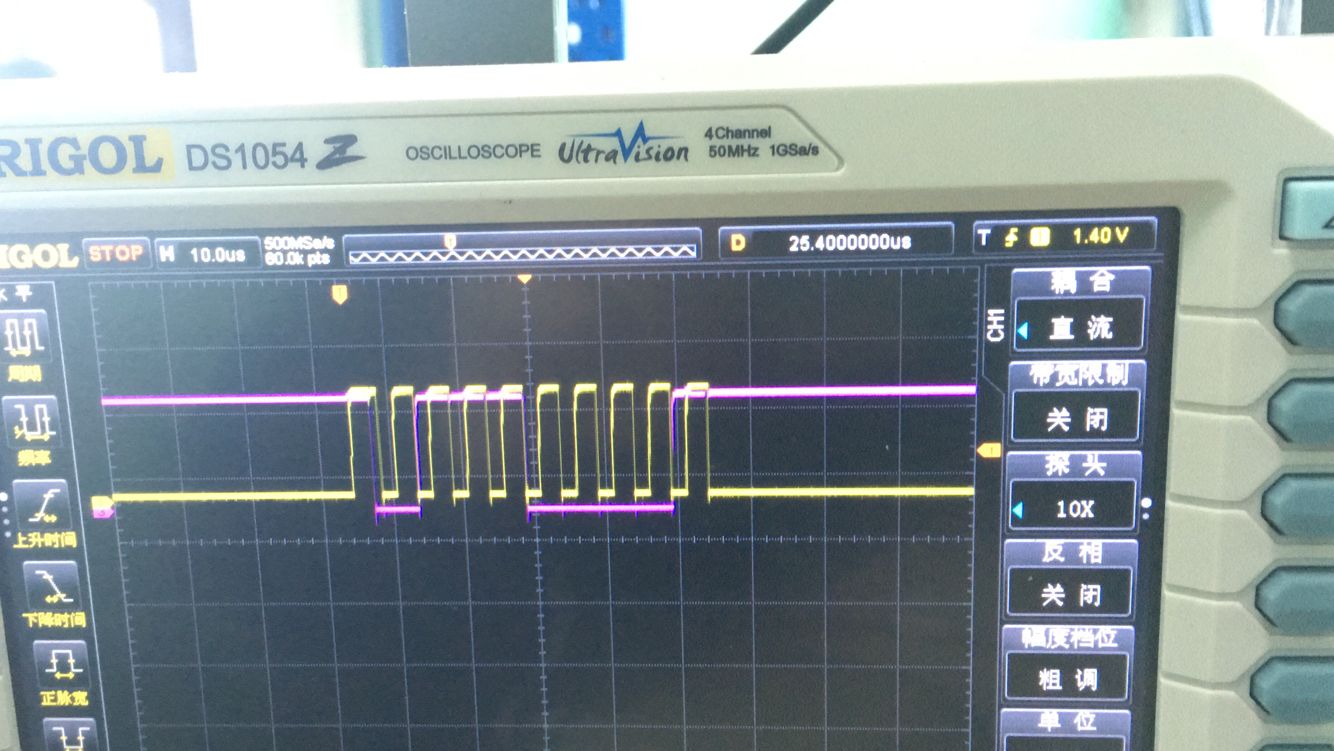
只要发起开始信号,SCL就自然变为低电平。
附件是源码
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_P5,
GPIO_PIN2 + GPIO_PIN3,
GPIO_PRIMARY_MODULE_FUNCTION
);
/*
* Disable the GPIO power-on default high-impedance mode to activate
* previously configured port settings
*/
PMM_unlockLPM5();
__delay_cycles(1000);
UCB0CTLW0 |= UCSWRST;// Software reset enabled
UCB0CTLW0 |= UCMODE_3 | UCMST | UCSYNC; // I2C mode, Master mode, sync
UCB0CTLW0 |= UCSSEL_2 ; // Use SMCLK, keep SW reset
UCB0BRW = 10; // fSCL = SMCLK/10 = ~100kHz
UCB0I2CSA = slaveAddress; // Slave Address is 048h
UCB0CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
void I2C_write(unsigned char *TX_buffer, int writeLength)
{
int i = 0;
/* Clear USCI_B0 TX interrupt flag */
UCB0IFG &= ~UCTXIFG; //
while (UCB0CTL1 & UCTXSTP); // Ensure stop condition got sent
// Set UCB0 as I2C's TX mode, and send a START condition
// This will also send out the slave address
UCB0CTL1 |= UCTR | UCTXSTT;
//Send the number of "writeLength" bytes out
for (i = 0; i < writeLength; i++) {
/* Wait for TX buffer to empty */
while (!(UCB0IFG & UCTXIFG));
/* Send pointer byte */
UCB0TXBUF = *TX_buffer++;
}
while (!(UCB0IFG & UCTXIFG));
/* Generate Stop condition */
UCB0CTL1 |= UCTXSTP;
/* Wait for Stop to finish */
while (UCB0CTL1 & UCTXSTP);
}
’
