Part Number: MSPM0G3519
Dear Team,
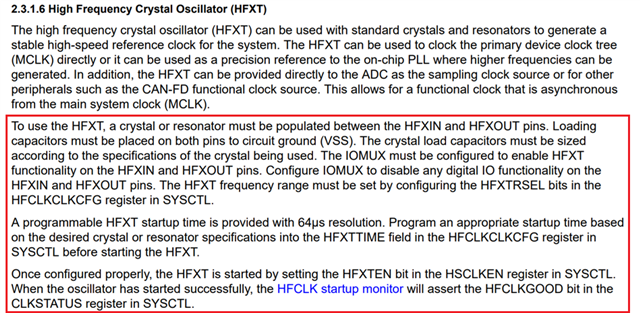
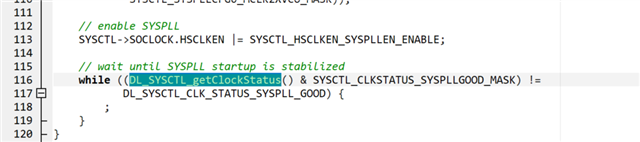
I am working on MSPM0G3519 controller(32 pin) and trying to start external crystal 16MHz, but it stuck at the below line:
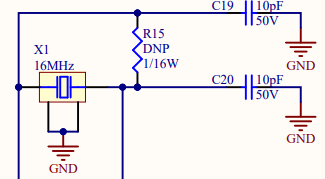
You can check the hardware design for crystal connection(HFIN connect at PTA5 and HFOUT connected at PTA6) :
Please check the attached configuration and help us to resolve the issue.
thank you.
/*
* Copyright (c) 2023, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ============ ti_msp_dl_config.c =============
* Configured MSPM0 DriverLib module definitions
*
* DO NOT EDIT - This file is generated for the MSPM0G351X
* by the SysConfig tool.
*/
#include "ti_msp_dl_config.h"
DL_TimerA_backupConfig gTIMER_10_MsBackup;
DL_TimerA_backupConfig gTIMER_1_MsBackup;
DL_SPI_backupConfig gSPI_1_EepromBackup;
/*
* ======== SYSCFG_DL_init ========
* Perform any initialization needed before using any board APIs
*/
SYSCONFIG_WEAK void SYSCFG_DL_init(void)
{
SYSCFG_DL_initPower();
SYSCFG_DL_GPIO_init();
/* Module-Specific Initializations*/
SYSCFG_DL_SYSCTL_init();
SYSCFG_DL_PWM_0_init();
SYSCFG_DL_TIMER_10_Ms_init();
SYSCFG_DL_TIMER_1_Ms_init();
SYSCFG_DL_LIN_0_init();
SYSCFG_DL_SPI_1_Eeprom_init();
SYSCFG_DL_WWDT1_init();
SYSCFG_DL_MCAN0_init();
SYSCFG_DL_SYSCTL_CLK_init();
/* Ensure backup structures have no valid state */
gTIMER_10_MsBackup.backupRdy = false;
gTIMER_1_MsBackup.backupRdy = false;
gSPI_1_EepromBackup.backupRdy = false;
}
/*
* User should take care to save and restore register configuration in application.
* See Retention Configuration section for more details.
*/
SYSCONFIG_WEAK bool SYSCFG_DL_saveConfiguration(void)
{
bool retStatus = true;
retStatus &= DL_TimerA_saveConfiguration(TIMER_10_Ms_INST, &gTIMER_10_MsBackup);
retStatus &= DL_TimerA_saveConfiguration(TIMER_1_Ms_INST, &gTIMER_1_MsBackup);
retStatus &= DL_SPI_saveConfiguration(SPI_1_Eeprom_INST, &gSPI_1_EepromBackup);
return retStatus;
}
SYSCONFIG_WEAK bool SYSCFG_DL_restoreConfiguration(void)
{
bool retStatus = true;
retStatus &= DL_TimerA_restoreConfiguration(TIMER_10_Ms_INST, &gTIMER_10_MsBackup, false);
retStatus &= DL_TimerA_restoreConfiguration(TIMER_1_Ms_INST, &gTIMER_1_MsBackup, false);
retStatus &= DL_SPI_restoreConfiguration(SPI_1_Eeprom_INST, &gSPI_1_EepromBackup);
return retStatus;
}
SYSCONFIG_WEAK void SYSCFG_DL_initPower(void)
{
DL_GPIO_reset(GPIOA);
DL_TimerG_reset(PWM_0_INST);
DL_TimerA_reset(TIMER_10_Ms_INST);
DL_TimerA_reset(TIMER_1_Ms_INST);
DL_UART_Extend_reset(LIN_0_INST);
DL_SPI_reset(SPI_1_Eeprom_INST);
DL_WWDT_reset(WWDT1_INST);
DL_MCAN_reset(MCAN0_INST);
DL_GPIO_enablePower(GPIOA);
DL_TimerG_enablePower(PWM_0_INST);
DL_TimerA_enablePower(TIMER_10_Ms_INST);
DL_TimerA_enablePower(TIMER_1_Ms_INST);
DL_UART_Extend_enablePower(LIN_0_INST);
DL_SPI_enablePower(SPI_1_Eeprom_INST);
DL_WWDT_enablePower(WWDT1_INST);
DL_MCAN_enablePower(MCAN0_INST);
delay_cycles(POWER_STARTUP_DELAY);
}
SYSCONFIG_WEAK void SYSCFG_DL_GPIO_init(void)
{
/* Configure GPIO/IOMUX for HFXT functionality */
DL_GPIO_initPeripheralAnalogFunction(GPIO_HFXIN_IOMUX);
DL_GPIO_initPeripheralAnalogFunction(GPIO_HFXOUT_IOMUX);
DL_GPIO_initPeripheralOutputFunction(GPIO_PWM_0_C0_IOMUX,GPIO_PWM_0_C0_IOMUX_FUNC);
DL_GPIO_enableOutput(GPIO_PWM_0_C0_PORT, GPIO_PWM_0_C0_PIN);
DL_GPIO_initPeripheralOutputFunction(
GPIO_LIN_0_IOMUX_TX, GPIO_LIN_0_IOMUX_TX_FUNC);
DL_GPIO_initPeripheralInputFunction(
GPIO_LIN_0_IOMUX_RX, GPIO_LIN_0_IOMUX_RX_FUNC);
DL_GPIO_initPeripheralOutputFunction(
GPIO_SPI_1_Eeprom_IOMUX_SCLK, GPIO_SPI_1_Eeprom_IOMUX_SCLK_FUNC);
DL_GPIO_initPeripheralOutputFunction(
GPIO_SPI_1_Eeprom_IOMUX_PICO, GPIO_SPI_1_Eeprom_IOMUX_PICO_FUNC);
DL_GPIO_initPeripheralInputFunction(
GPIO_SPI_1_Eeprom_IOMUX_POCI, GPIO_SPI_1_Eeprom_IOMUX_POCI_FUNC);
DL_GPIO_initDigitalOutput(GPIO_GRP_PTA_PIN_IND_LED6_IOMUX);
DL_GPIO_initDigitalOutput(GPIO_GRP_PTA_EEPROM_CS_PIN_IOMUX);
DL_GPIO_clearPins(GPIO_GRP_PTA_PORT, GPIO_GRP_PTA_PIN_IND_LED6_PIN);
DL_GPIO_setPins(GPIO_GRP_PTA_PORT, GPIO_GRP_PTA_EEPROM_CS_PIN_PIN);
DL_GPIO_enableOutput(GPIO_GRP_PTA_PORT, GPIO_GRP_PTA_PIN_IND_LED6_PIN |
GPIO_GRP_PTA_EEPROM_CS_PIN_PIN);
DL_GPIO_initPeripheralOutputFunction(
GPIO_MCAN0_IOMUX_CAN_TX, GPIO_MCAN0_IOMUX_CAN_TX_FUNC);
DL_GPIO_initPeripheralInputFunction(
GPIO_MCAN0_IOMUX_CAN_RX, GPIO_MCAN0_IOMUX_CAN_RX_FUNC);
}
static const DL_SYSCTL_SYSPLLConfig gSYSPLLConfig = {
.inputFreq = DL_SYSCTL_SYSPLL_INPUT_FREQ_16_32_MHZ,
.rDivClk2x = 1,
.rDivClk1 = 0,
.rDivClk0 = 0,
.enableCLK2x = DL_SYSCTL_SYSPLL_CLK2X_ENABLE,
.enableCLK1 = DL_SYSCTL_SYSPLL_CLK1_ENABLE,
.enableCLK0 = DL_SYSCTL_SYSPLL_CLK0_ENABLE,
.sysPLLMCLK = DL_SYSCTL_SYSPLL_MCLK_CLK2X,
.sysPLLRef = DL_SYSCTL_SYSPLL_REF_HFCLK,
.qDiv = 4,
.pDiv = DL_SYSCTL_SYSPLL_PDIV_1,
};
SYSCONFIG_WEAK void SYSCFG_DL_SYSCTL_init(void)
{
//Low Power Mode is configured to be SLEEP0
DL_SYSCTL_setBORThreshold(DL_SYSCTL_BOR_THRESHOLD_LEVEL_0);
DL_SYSCTL_setFlashWaitState(DL_SYSCTL_FLASH_WAIT_STATE_2);
DL_SYSCTL_setSYSOSCFreq(DL_SYSCTL_SYSOSC_FREQ_BASE);
/* Set default configuration */
DL_SYSCTL_disableHFXT();
DL_SYSCTL_disableSYSPLL();
DL_SYSCTL_setHFCLKSourceHFXTParams(DL_SYSCTL_HFXT_RANGE_8_16_MHZ, 10, false);
DL_SYSCTL_configSYSPLL((DL_SYSCTL_SYSPLLConfig *) &gSYSPLLConfig);
DL_SYSCTL_setULPCLKDivider(DL_SYSCTL_ULPCLK_DIV_1);
DL_SYSCTL_setMCLKSource(SYSOSC, HSCLK, DL_SYSCTL_HSCLK_SOURCE_SYSPLL);
DL_SYSCTL_setMCLKDivider(DL_SYSCTL_MCLK_DIVIDER_DISABLE);
}
SYSCONFIG_WEAK void SYSCFG_DL_SYSCTL_CLK_init(void) {
while ((DL_SYSCTL_getClockStatus() & (DL_SYSCTL_CLK_STATUS_SYSPLL_GOOD
| DL_SYSCTL_CLK_STATUS_HFCLK_GOOD
| DL_SYSCTL_CLK_STATUS_HSCLK_GOOD
| DL_SYSCTL_CLK_STATUS_LFOSC_GOOD))
!= (DL_SYSCTL_CLK_STATUS_SYSPLL_GOOD
| DL_SYSCTL_CLK_STATUS_HFCLK_GOOD
| DL_SYSCTL_CLK_STATUS_HSCLK_GOOD
| DL_SYSCTL_CLK_STATUS_LFOSC_GOOD))
{
/* Ensure that clocks are in default POR configuration before initialization.
* Additionally once LFXT is enabled, the internal LFOSC is disabled, and cannot
* be re-enabled other than by executing a BOOTRST. */
;
}
}
/*
* Timer clock configuration to be sourced by / 4 (20000000 Hz)
* timerClkFreq = (timerClkSrc / (timerClkDivRatio * (timerClkPrescale + 1)))
* 20000000 Hz = 20000000 Hz / (4 * (0 + 1))
*/
static const DL_TimerG_ClockConfig gPWM_0ClockConfig = {
.clockSel = DL_TIMER_CLOCK_BUSCLK,
.divideRatio = DL_TIMER_CLOCK_DIVIDE_4,
.prescale = 0U
};
static const DL_TimerG_PWMConfig gPWM_0Config = {
.pwmMode = DL_TIMER_PWM_MODE_EDGE_ALIGN_UP,
.period = 1000,
.isTimerWithFourCC = false,
.startTimer = DL_TIMER_STOP,
};
SYSCONFIG_WEAK void SYSCFG_DL_PWM_0_init(void) {
DL_TimerG_setClockConfig(
PWM_0_INST, (DL_TimerG_ClockConfig *) &gPWM_0ClockConfig);
DL_TimerG_initPWMMode(
PWM_0_INST, (DL_TimerG_PWMConfig *) &gPWM_0Config);
// Set Counter control to the smallest CC index being used
DL_TimerG_setCounterControl(PWM_0_INST,DL_TIMER_CZC_CCCTL0_ZCOND,DL_TIMER_CAC_CCCTL0_ACOND,DL_TIMER_CLC_CCCTL0_LCOND);
DL_TimerG_setCaptureCompareOutCtl(PWM_0_INST, DL_TIMER_CC_OCTL_INIT_VAL_LOW,
DL_TIMER_CC_OCTL_INV_OUT_DISABLED, DL_TIMER_CC_OCTL_SRC_FUNCVAL,
DL_TIMERG_CAPTURE_COMPARE_0_INDEX);
DL_TimerG_setCaptCompUpdateMethod(PWM_0_INST, DL_TIMER_CC_UPDATE_METHOD_IMMEDIATE, DL_TIMERG_CAPTURE_COMPARE_0_INDEX);
DL_TimerG_setCaptureCompareValue(PWM_0_INST, 0, DL_TIMER_CC_0_INDEX);
DL_TimerG_enableClock(PWM_0_INST);
DL_TimerG_setCCPDirection(PWM_0_INST , DL_TIMER_CC0_OUTPUT );
}
/*
* Timer clock configuration to be sourced by BUSCLK / (10000000 Hz)
* timerClkFreq = (timerClkSrc / (timerClkDivRatio * (timerClkPrescale + 1)))
* 10000000 Hz = 10000000 Hz / (8 * (0 + 1))
*/
static const DL_TimerA_ClockConfig gTIMER_10_MsClockConfig = {
.clockSel = DL_TIMER_CLOCK_BUSCLK,
.divideRatio = DL_TIMER_CLOCK_DIVIDE_8,
.prescale = 0U,
};
/*
* Timer load value (where the counter starts from) is calculated as (timerPeriod * timerClockFreq) - 1
* TIMER_10_Ms_INST_LOAD_VALUE = (5ms * 10000000 Hz) - 1
*/
static const DL_TimerA_TimerConfig gTIMER_10_MsTimerConfig = {
.period = TIMER_10_Ms_INST_LOAD_VALUE,
.timerMode = DL_TIMER_TIMER_MODE_PERIODIC,
.startTimer = DL_TIMER_STOP,
};
SYSCONFIG_WEAK void SYSCFG_DL_TIMER_10_Ms_init(void) {
DL_TimerA_setClockConfig(TIMER_10_Ms_INST,
(DL_TimerA_ClockConfig *) &gTIMER_10_MsClockConfig);
DL_TimerA_initTimerMode(TIMER_10_Ms_INST,
(DL_TimerA_TimerConfig *) &gTIMER_10_MsTimerConfig);
DL_TimerA_enableInterrupt(TIMER_10_Ms_INST , DL_TIMERA_INTERRUPT_REPC_EVENT);
DL_TimerA_setRepeatCounter(TIMER_10_Ms_INST, TIMER_10_Ms_REPEAT_COUNT_2);
DL_TimerA_enableClock(TIMER_10_Ms_INST);
}
/*
* Timer clock configuration to be sourced by BUSCLK / (10000000 Hz)
* timerClkFreq = (timerClkSrc / (timerClkDivRatio * (timerClkPrescale + 1)))
* 10000000 Hz = 10000000 Hz / (8 * (0 + 1))
*/
static const DL_TimerA_ClockConfig gTIMER_1_MsClockConfig = {
.clockSel = DL_TIMER_CLOCK_BUSCLK,
.divideRatio = DL_TIMER_CLOCK_DIVIDE_8,
.prescale = 0U,
};
/*
* Timer load value (where the counter starts from) is calculated as (timerPeriod * timerClockFreq) - 1
* TIMER_1_Ms_INST_LOAD_VALUE = (1 ms * 10000000 Hz) - 1
*/
static const DL_TimerA_TimerConfig gTIMER_1_MsTimerConfig = {
.period = TIMER_1_Ms_INST_LOAD_VALUE,
.timerMode = DL_TIMER_TIMER_MODE_PERIODIC,
.startTimer = DL_TIMER_STOP,
};
SYSCONFIG_WEAK void SYSCFG_DL_TIMER_1_Ms_init(void) {
DL_TimerA_setClockConfig(TIMER_1_Ms_INST,
(DL_TimerA_ClockConfig *) &gTIMER_1_MsClockConfig);
DL_TimerA_initTimerMode(TIMER_1_Ms_INST,
(DL_TimerA_TimerConfig *) &gTIMER_1_MsTimerConfig);
DL_TimerA_enableInterrupt(TIMER_1_Ms_INST , DL_TIMERA_INTERRUPT_ZERO_EVENT);
DL_TimerA_enableClock(TIMER_1_Ms_INST);
}
static const DL_UART_Extend_ClockConfig gLIN_0ClockConfig = {
.clockSel = DL_UART_EXTEND_CLOCK_BUSCLK,
.divideRatio = DL_UART_EXTEND_CLOCK_DIVIDE_RATIO_2
};
static const DL_UART_Extend_Config gLIN_0Config = {
.mode = DL_UART_EXTEND_MODE_NORMAL,
.direction = DL_UART_EXTEND_DIRECTION_TX_RX,
.flowControl = DL_UART_EXTEND_FLOW_CONTROL_NONE,
.parity = DL_UART_EXTEND_PARITY_NONE,
.wordLength = DL_UART_EXTEND_WORD_LENGTH_8_BITS,
.stopBits = DL_UART_EXTEND_STOP_BITS_ONE
};
SYSCONFIG_WEAK void SYSCFG_DL_LIN_0_init(void)
{
DL_UART_Extend_setClockConfig(LIN_0_INST, (DL_UART_Extend_ClockConfig *) &gLIN_0ClockConfig);
DL_UART_Extend_init(LIN_0_INST, (DL_UART_Extend_Config *) &gLIN_0Config);
/*
* Configure baud rate by setting oversampling and baud rate divisors.
* Target baud rate: 19200
* Actual baud rate: 19200.77
*/
DL_UART_Extend_setOversampling(LIN_0_INST, DL_UART_OVERSAMPLING_RATE_16X);
DL_UART_Extend_setBaudRateDivisor(LIN_0_INST, LIN_0_IBRD_40_MHZ_19200_BAUD, LIN_0_FBRD_40_MHZ_19200_BAUD);
/* Configure Interrupts */
DL_UART_Extend_enableInterrupt(LIN_0_INST,
DL_UART_EXTEND_INTERRUPT_BREAK_ERROR |
DL_UART_EXTEND_INTERRUPT_LINC0_MATCH |
DL_UART_EXTEND_INTERRUPT_LIN_COUNTER_OVERFLOW |
DL_UART_EXTEND_INTERRUPT_LIN_FALLING_EDGE |
DL_UART_EXTEND_INTERRUPT_RXD_POS_EDGE);
/* Configure LIN settings */
DL_UART_Extend_enableLINCounter(LIN_0_INST);
DL_UART_Extend_setLINCounterValue(LIN_0_INST, 0);
DL_UART_Extend_enableLINCounterCompareMatch(LIN_0_INST);
DL_UART_Extend_setLINCounterCompareValue(LIN_0_INST, LIN_0_COUNTER_COMPARE_VALUE);
DL_UART_Extend_enableLINCountWhileLow(LIN_0_INST);
DL_UART_Extend_enableLINCounterClearOnFallingEdge(LIN_0_INST);
DL_UART_Extend_enable(LIN_0_INST);
}
static const DL_SPI_Config gSPI_1_Eeprom_config = {
.mode = DL_SPI_MODE_CONTROLLER,
.frameFormat = DL_SPI_FRAME_FORMAT_MOTO3_POL0_PHA0,
.parity = DL_SPI_PARITY_NONE,
.dataSize = DL_SPI_DATA_SIZE_8,
.bitOrder = DL_SPI_BIT_ORDER_MSB_FIRST,
};
static const DL_SPI_ClockConfig gSPI_1_Eeprom_clockConfig = {
.clockSel = DL_SPI_CLOCK_BUSCLK,
.divideRatio = DL_SPI_CLOCK_DIVIDE_RATIO_1
};
SYSCONFIG_WEAK void SYSCFG_DL_SPI_1_Eeprom_init(void) {
DL_SPI_setClockConfig(SPI_1_Eeprom_INST, (DL_SPI_ClockConfig *) &gSPI_1_Eeprom_clockConfig);
DL_SPI_init(SPI_1_Eeprom_INST, (DL_SPI_Config *) &gSPI_1_Eeprom_config);
/* Configure Controller mode */
/*
* Set the bit rate clock divider to generate the serial output clock
* outputBitRate = (spiInputClock) / ((1 + SCR) * 2)
* 4000000 = (80000000)/((1 + 9) * 2)
*/
DL_SPI_setBitRateSerialClockDivider(SPI_1_Eeprom_INST, 9);
/* Set RX and TX FIFO threshold levels */
DL_SPI_setFIFOThreshold(SPI_1_Eeprom_INST, DL_SPI_RX_FIFO_LEVEL_1_2_FULL, DL_SPI_TX_FIFO_LEVEL_1_2_EMPTY);
/* Enable module */
DL_SPI_enable(SPI_1_Eeprom_INST);
}
SYSCONFIG_WEAK void SYSCFG_DL_WWDT1_init(void)
{
/*
* Initialize WWDT1 in Watchdog mode with following settings
* Watchdog Source Clock = (LFCLK Freq) / (WWDT Clock Divider)
* = 32768Hz / 2 = 16.38 kHz
* Watchdog Period = (WWDT Clock Divider) ∗ (WWDT Period Count) / 32768Hz
* = 2 * 2^12 / 32768Hz = 250.00 ms
* Window0 Closed Period = (WWDT Period) * (Window0 Closed Percent)
* = 250.00 ms * 0% = 0.00 s
* Window1 Closed Period = (WWDT Period) * (Window1 Closed Percent)
* = 250.00 ms * 0% = 0.00 s
*/
DL_WWDT_initWatchdogMode(WWDT1_INST, DL_WWDT_CLOCK_DIVIDE_2,
DL_WWDT_TIMER_PERIOD_12_BITS, DL_WWDT_STOP_IN_SLEEP,
DL_WWDT_WINDOW_PERIOD_0, DL_WWDT_WINDOW_PERIOD_0);
/* Set Window0 as active window */
DL_WWDT_setActiveWindow(WWDT1_INST, DL_WWDT_WINDOW0);
}
static const DL_MCAN_ClockConfig gMCAN0ClockConf = {
.clockSel = DL_MCAN_FCLK_HFCLK,
.divider = DL_MCAN_FCLK_DIV_1,
};
static const DL_MCAN_InitParams gMCAN0InitParams= {
/* Initialize MCAN Init parameters. */
.fdMode = true,
.brsEnable = true,
.txpEnable = false,
.efbi = false,
.pxhddisable = false,
.darEnable = false,
.wkupReqEnable = true,
.autoWkupEnable = true,
.emulationEnable = true,
.tdcEnable = true,
.wdcPreload = 255,
/* Transmitter Delay Compensation parameters. */
.tdcConfig.tdcf = 10,
.tdcConfig.tdco = 6,
};
static const DL_MCAN_ConfigParams gMCAN0ConfigParams={
/* Initialize MCAN Config parameters. */
.monEnable = false,
.asmEnable = false,
.tsPrescalar = 15,
.tsSelect = 0,
.timeoutSelect = DL_MCAN_TIMEOUT_SELECT_CONT,
.timeoutPreload = 65535,
.timeoutCntEnable = false,
.filterConfig.rrfs = true,
.filterConfig.rrfe = true,
.filterConfig.anfe = 1,
.filterConfig.anfs = 1,
};
static const DL_MCAN_MsgRAMConfigParams gMCAN0MsgRAMConfigParams ={
/* Standard ID Filter List Start Address. */
.flssa = MCAN0_INST_MCAN_STD_ID_FILT_START_ADDR,
/* List Size: Standard ID. */
.lss = MCAN0_INST_MCAN_STD_ID_FILTER_NUM,
/* Extended ID Filter List Start Address. */
.flesa = MCAN0_INST_MCAN_EXT_ID_FILT_START_ADDR,
/* List Size: Extended ID. */
.lse = MCAN0_INST_MCAN_EXT_ID_FILTER_NUM,
/* Tx Buffers Start Address. */
.txStartAddr = MCAN0_INST_MCAN_TX_BUFF_START_ADDR,
/* Number of Dedicated Transmit Buffers. */
.txBufNum = MCAN0_INST_MCAN_TX_BUFF_SIZE,
.txFIFOSize = 10,
/* Tx Buffer Element Size. */
.txBufMode = 0,
.txBufElemSize = DL_MCAN_ELEM_SIZE_64BYTES,
/* Tx Event FIFO Start Address. */
.txEventFIFOStartAddr = MCAN0_INST_MCAN_TX_EVENT_START_ADDR,
/* Event FIFO Size. */
.txEventFIFOSize = MCAN0_INST_MCAN_TX_EVENT_SIZE,
/* Level for Tx Event FIFO watermark interrupt. */
.txEventFIFOWaterMark = 0,
/* Rx FIFO0 Start Address. */
.rxFIFO0startAddr = MCAN0_INST_MCAN_FIFO_0_START_ADDR,
/* Number of Rx FIFO elements. */
.rxFIFO0size = MCAN0_INST_MCAN_FIFO_0_NUM,
/* Rx FIFO0 Watermark. */
.rxFIFO0waterMark = 0,
.rxFIFO0OpMode = 0,
/* Rx FIFO1 Start Address. */
.rxFIFO1startAddr = MCAN0_INST_MCAN_FIFO_1_START_ADDR,
/* Number of Rx FIFO elements. */
.rxFIFO1size = MCAN0_INST_MCAN_FIFO_1_NUM,
/* Level for Rx FIFO 1 watermark interrupt. */
.rxFIFO1waterMark = 0,
/* FIFO blocking mode. */
.rxFIFO1OpMode = 0,
/* Rx Buffer Start Address. */
.rxBufStartAddr = MCAN0_INST_MCAN_RX_BUFF_START_ADDR,
/* Rx Buffer Element Size. */
.rxBufElemSize = DL_MCAN_ELEM_SIZE_64BYTES,
/* Rx FIFO0 Element Size. */
.rxFIFO0ElemSize = DL_MCAN_ELEM_SIZE_64BYTES,
/* Rx FIFO1 Element Size. */
.rxFIFO1ElemSize = DL_MCAN_ELEM_SIZE_64BYTES,
};
static const DL_MCAN_StdMsgIDFilterElement gMCAN0StdFiltelem = {
.sfec = 0x7,
.sft = 0x1,
.sfid1 = 272,
.sfid2 = 0,
};
static const DL_MCAN_BitTimingParams gMCAN0BitTimes = {
/* Arbitration Baud Rate Pre-scaler. */
.nomRatePrescalar = 0,
/* Arbitration Time segment before sample point. */
.nomTimeSeg1 = 26,
/* Arbitration Time segment after sample point. */
.nomTimeSeg2 = 3,
/* Arbitration (Re)Synchronization Jump Width Range. */
.nomSynchJumpWidth = 3,
/* Data Baud Rate Pre-scaler. */
.dataRatePrescalar = 0,
/* Data Time segment before sample point. */
.dataTimeSeg1 = 5,
/* Data Time segment after sample point. */
.dataTimeSeg2 = 0,
/* Data (Re)Synchronization Jump Width. */
.dataSynchJumpWidth = 0,
};
SYSCONFIG_WEAK void SYSCFG_DL_MCAN0_init(void) {
DL_MCAN_RevisionId revid_MCAN0;
DL_MCAN_enableModuleClock(MCAN0_INST);
DL_MCAN_setClockConfig(MCAN0_INST, (DL_MCAN_ClockConfig *) &gMCAN0ClockConf);
/* Get MCANSS Revision ID. */
DL_MCAN_getRevisionId(MCAN0_INST, &revid_MCAN0);
/* Wait for Memory initialization to be completed. */
while(false == DL_MCAN_isMemInitDone(MCAN0_INST));
/* Put MCAN in SW initialization mode. */
DL_MCAN_setOpMode(MCAN0_INST, DL_MCAN_OPERATION_MODE_SW_INIT);
/* Wait till MCAN is not initialized. */
while (DL_MCAN_OPERATION_MODE_SW_INIT != DL_MCAN_getOpMode(MCAN0_INST));
/* Initialize MCAN module. */
DL_MCAN_init(MCAN0_INST, (DL_MCAN_InitParams *) &gMCAN0InitParams);
/* Configure MCAN module. */
DL_MCAN_config(MCAN0_INST, (DL_MCAN_ConfigParams*) &gMCAN0ConfigParams);
/* Configure Bit timings. */
DL_MCAN_setBitTime(MCAN0_INST, (DL_MCAN_BitTimingParams*) &gMCAN0BitTimes);
/* Configure Message RAM Sections */
DL_MCAN_msgRAMConfig(MCAN0_INST, (DL_MCAN_MsgRAMConfigParams*) &gMCAN0MsgRAMConfigParams);
/* Configure Standard ID filter element */
DL_MCAN_addStdMsgIDFilter(MCAN0_INST, 0U, (DL_MCAN_StdMsgIDFilterElement *) &gMCAN0StdFiltelem);
/* Set Extended ID Mask. */
DL_MCAN_setExtIDAndMask(MCAN0_INST, MCAN0_INST_MCAN_EXT_ID_AND_MASK );
/* Loopback mode */
/* Take MCAN out of the SW initialization mode */
DL_MCAN_setOpMode(MCAN0_INST, DL_MCAN_OPERATION_MODE_NORMAL);
while (DL_MCAN_OPERATION_MODE_NORMAL != DL_MCAN_getOpMode(MCAN0_INST));
/* Enable MCAN mopdule Interrupts */
DL_MCAN_enableIntr(MCAN0_INST, MCAN0_INST_MCAN_INTERRUPTS, 1U);
DL_MCAN_selectIntrLine(MCAN0_INST, DL_MCAN_INTERRUPT_BO|DL_MCAN_INTERRUPT_DRX|DL_MCAN_INTERRUPT_TC, DL_MCAN_INTR_LINE_NUM_0);
DL_MCAN_enableIntrLine(MCAN0_INST, DL_MCAN_INTR_LINE_NUM_0, 1U);
/* Enable MSPM0 MCAN interrupt */
DL_MCAN_clearInterruptStatus(MCAN0_INST,(DL_MCAN_MSP_INTERRUPT_LINE0));
DL_MCAN_enableInterrupt(MCAN0_INST,(DL_MCAN_MSP_INTERRUPT_LINE0));
}