

Part Number: SYSCONFIG
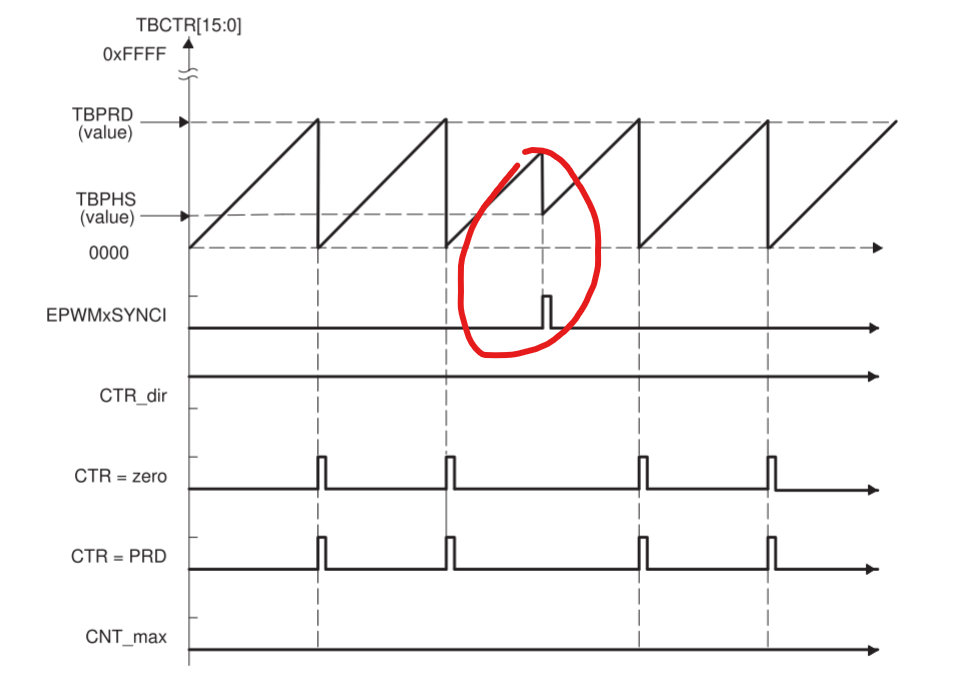
when the inductor current is greater than 0, the CMPSS pin inputs a high level (1); when the inductor current is less than 0, the CMPSS pin inputs a low level (0). The ePWM1 counter is refreshed when the CMPSS comparison value transitions from 1 to 0.
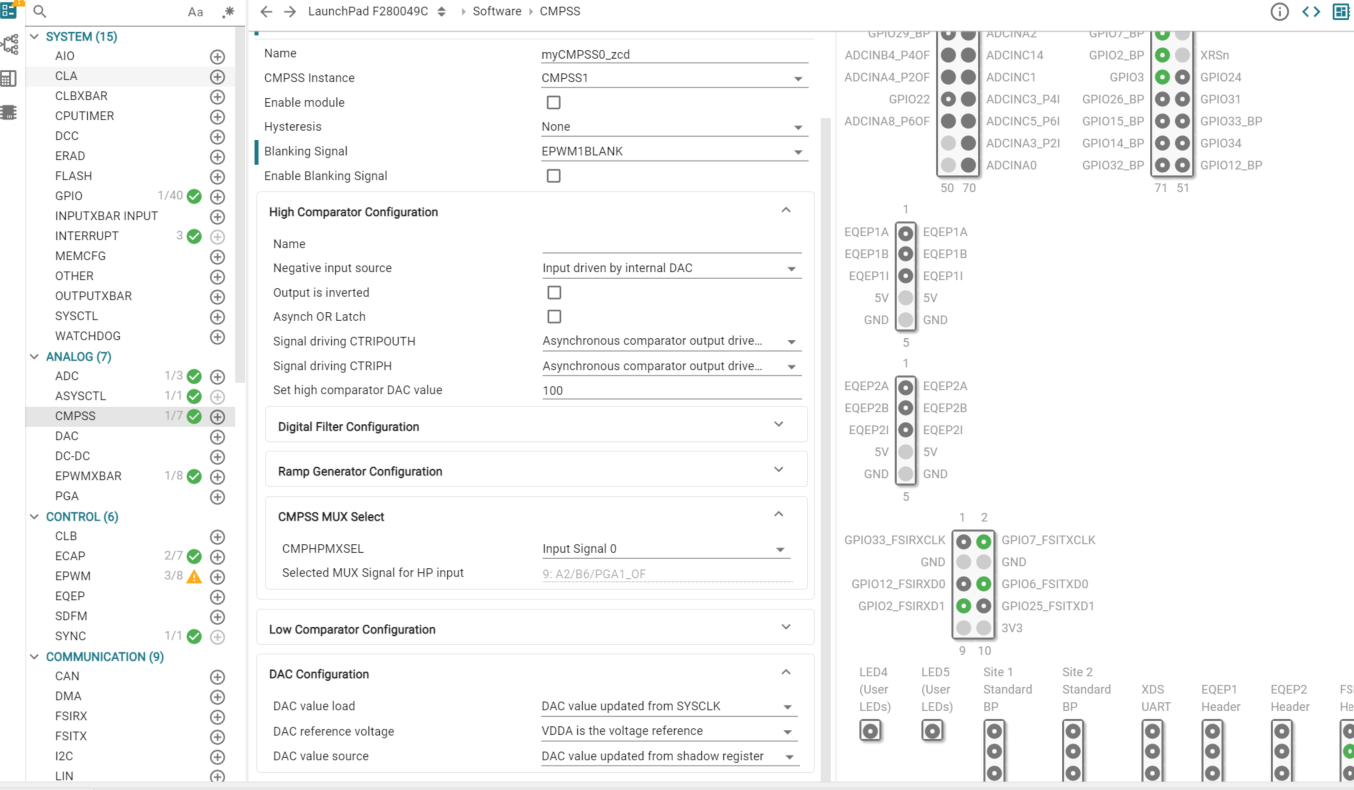
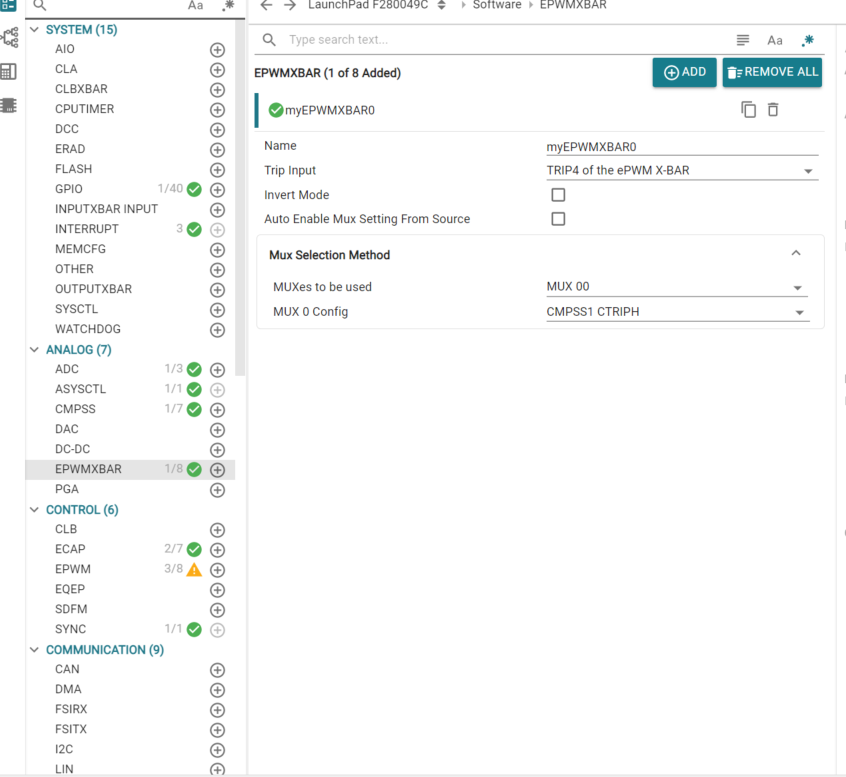
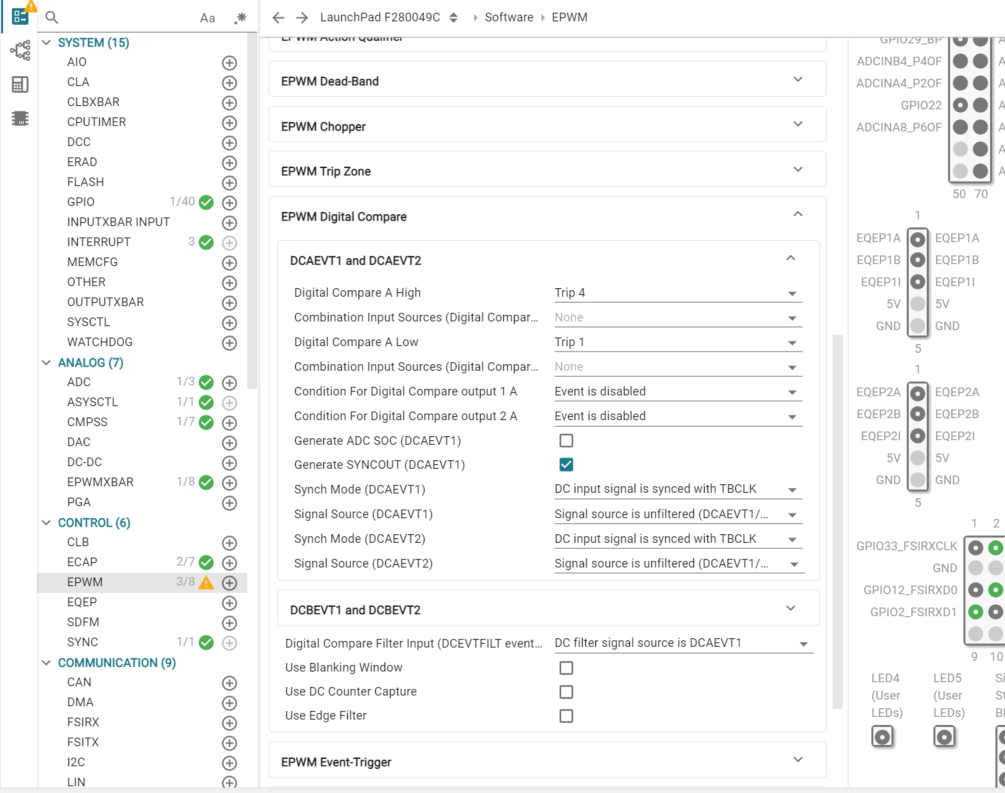
Could you help check if the configuration here is correct?
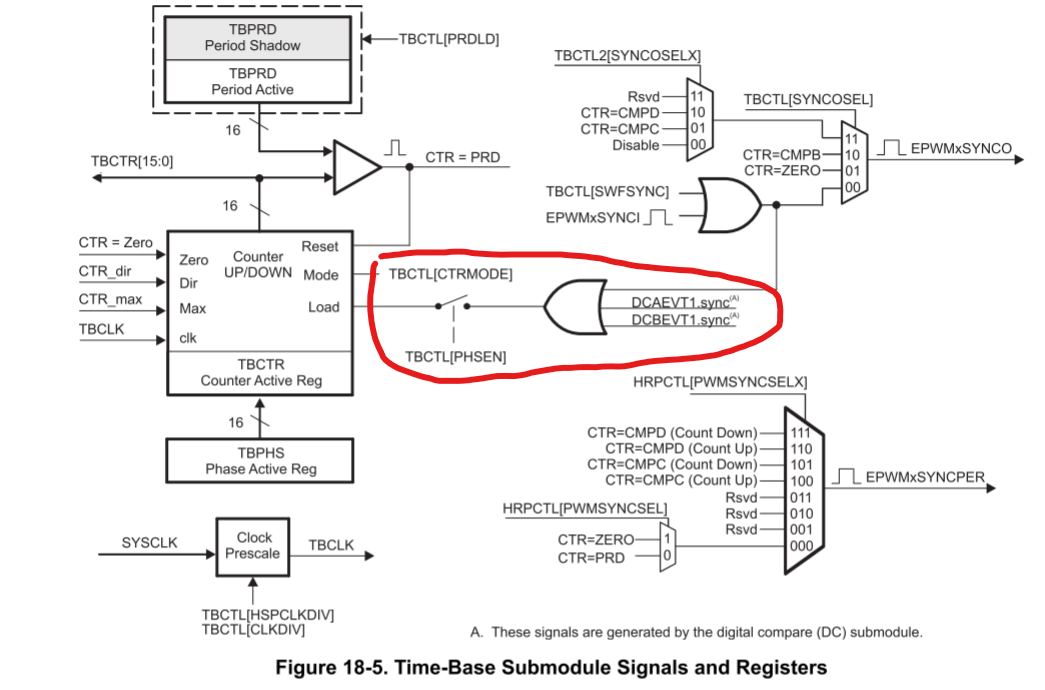
My approach is: CMPSS → ePWM X-Bar → ePWM1. When ZCD is generated, DCAEVT1.sync is triggered; configure TBPHS=0 to reset the counter.
But does this TBPHS need to be filled in manually?
/*
* Copyright (c) 2020 Texas Instruments Incorporated - http://www.ti.com
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "board.h"
//*****************************************************************************
//
// Board Configurations
// Initializes the rest of the modules.
// Call this function in your application if you wish to do all module
// initialization.
// If you wish to not use some of the initializations, instead of the
// Board_init use the individual Module_inits
//
//*****************************************************************************
void Board_init()
{
EALLOW;
PinMux_init();
SYNC_init();
ASYSCTL_init();
ADC_init();
CMPSS_init();
ECAP_init();
EPWM_init();
EPWMXBAR_init();
GPIO_init();
INTERRUPT_init();
EDIS;
}
//*****************************************************************************
//
// PINMUX Configurations
//
//*****************************************************************************
void PinMux_init()
{
//
// PinMux for modules assigned to CPU1
//
//
// EPWM2 -> myEPWM0 Pinmux
//
GPIO_setPinConfig(myEPWM0_EPWMA_PIN_CONFIG);
GPIO_setPadConfig(myEPWM0_EPWMA_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myEPWM0_EPWMA_GPIO, GPIO_QUAL_SYNC);
GPIO_setPinConfig(myEPWM0_EPWMB_PIN_CONFIG);
GPIO_setPadConfig(myEPWM0_EPWMB_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myEPWM0_EPWMB_GPIO, GPIO_QUAL_SYNC);
//
// EPWM1 -> myEPWM1 Pinmux
//
GPIO_setPinConfig(myEPWM1_EPWMA_PIN_CONFIG);
GPIO_setPadConfig(myEPWM1_EPWMA_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myEPWM1_EPWMA_GPIO, GPIO_QUAL_SYNC);
GPIO_setPinConfig(myEPWM1_EPWMB_PIN_CONFIG);
GPIO_setPadConfig(myEPWM1_EPWMB_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myEPWM1_EPWMB_GPIO, GPIO_QUAL_SYNC);
//
// EPWM4 -> myEPWM2 Pinmux
//
GPIO_setPinConfig(myEPWM2_EPWMA_PIN_CONFIG);
GPIO_setPadConfig(myEPWM2_EPWMA_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myEPWM2_EPWMA_GPIO, GPIO_QUAL_SYNC);
GPIO_setPinConfig(myEPWM2_EPWMB_PIN_CONFIG);
GPIO_setPadConfig(myEPWM2_EPWMB_GPIO, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myEPWM2_EPWMB_GPIO, GPIO_QUAL_SYNC);
// GPIO58 -> myGPIO_Relay Pinmux
GPIO_setPinConfig(GPIO_58_GPIO58);
}
//*****************************************************************************
//
// ADC Configurations
//
//*****************************************************************************
void ADC_init(){
myADCA_init();
}
void myADCA_init(){
//
// ADC Initialization: Write ADC configurations and power up the ADC
//
// Set the analog voltage reference selection and ADC module's offset trims.
// This function sets the analog voltage reference to internal (with the reference voltage of 1.65V or 2.5V) or external for ADC
// which is same as ASysCtl APIs.
//
ADC_setVREF(myADCA_BASE, ADC_REFERENCE_EXTERNAL, ADC_REFERENCE_2_5V);
//
// Configures the analog-to-digital converter module prescaler.
//
ADC_setPrescaler(myADCA_BASE, ADC_CLK_DIV_2_0);
//
// Sets the timing of the end-of-conversion pulse
//
ADC_setInterruptPulseMode(myADCA_BASE, ADC_PULSE_END_OF_ACQ_WIN);
//
// Sets the timing of early interrupt generation.
//
ADC_setInterruptCycleOffset(myADCA_BASE, 0U);
//
// Powers up the analog-to-digital converter core.
//
ADC_enableConverter(myADCA_BASE);
//
// Delay for 1ms to allow ADC time to power up
//
DEVICE_DELAY_US(500);
//
// SOC Configuration: Setup ADC EPWM channel and trigger settings
//
// Disables SOC burst mode.
//
ADC_disableBurstMode(myADCA_BASE);
//
// Sets the priority mode of the SOCs.
//
ADC_setSOCPriority(myADCA_BASE, ADC_PRI_ALL_ROUND_ROBIN);
//
// Start of Conversion 0 Configuration
//
//
// Configures a start-of-conversion (SOC) in the ADC and its interrupt SOC trigger.
// SOC number : 0
// Trigger : ADC_TRIGGER_EPWM2_SOCA
// Channel : ADC_CH_ADCIN0
// Sample Window : 10 SYSCLK cycles
// Interrupt Trigger: ADC_INT_SOC_TRIGGER_NONE
//
ADC_setupSOC(myADCA_BASE, ADC_SOC_NUMBER0, ADC_TRIGGER_EPWM2_SOCA, ADC_CH_ADCIN0, 10U);
ADC_setInterruptSOCTrigger(myADCA_BASE, ADC_SOC_NUMBER0, ADC_INT_SOC_TRIGGER_NONE);
//
// Start of Conversion 1 Configuration
//
//
// Configures a start-of-conversion (SOC) in the ADC and its interrupt SOC trigger.
// SOC number : 1
// Trigger : ADC_TRIGGER_EPWM2_SOCA
// Channel : ADC_CH_ADCIN1
// Sample Window : 10 SYSCLK cycles
// Interrupt Trigger: ADC_INT_SOC_TRIGGER_NONE
//
ADC_setupSOC(myADCA_BASE, ADC_SOC_NUMBER1, ADC_TRIGGER_EPWM2_SOCA, ADC_CH_ADCIN1, 10U);
ADC_setInterruptSOCTrigger(myADCA_BASE, ADC_SOC_NUMBER1, ADC_INT_SOC_TRIGGER_NONE);
}
//*****************************************************************************
//
// ASYSCTL Configurations
//
//*****************************************************************************
void ASYSCTL_init(){
//
// asysctl initialization
//
// Disables the temperature sensor output to the ADC.
//
ASysCtl_disableTemperatureSensor();
//
// Set the analog voltage reference selection to external.
//
ASysCtl_setAnalogReferenceExternal( ASYSCTL_VREFHIA | ASYSCTL_VREFHIB | ASYSCTL_VREFHIC );
}
//*****************************************************************************
//
// CMPSS Configurations
//
//*****************************************************************************
void CMPSS_init(){
myCMPSS0_zcd_init();
}
void myCMPSS0_zcd_init(){
//
// Select the value for CMP1HPMXSEL.
//
ASysCtl_selectCMPHPMux(ASYSCTL_CMPHPMUX_SELECT_1,0U);
//
// Select the value for CMP1LPMXSEL.
//
ASysCtl_selectCMPLPMux(ASYSCTL_CMPLPMUX_SELECT_1,0U);
//
// Sets the configuration for the high comparator.
//
CMPSS_configHighComparator(myCMPSS0_zcd_BASE,(CMPSS_INSRC_DAC));
//
// Sets the configuration for the low comparator.
//
CMPSS_configLowComparator(myCMPSS0_zcd_BASE,(CMPSS_INSRC_DAC));
//
// Sets the configuration for the internal comparator DACs.
//
CMPSS_configDAC(myCMPSS0_zcd_BASE,(CMPSS_DACVAL_SYSCLK | CMPSS_DACREF_VDDA | CMPSS_DACSRC_SHDW));
//
// Sets the value of the internal DAC of the high comparator.
//
CMPSS_setDACValueHigh(myCMPSS0_zcd_BASE,100U);
//
// Sets the value of the internal DAC of the low comparator.
//
CMPSS_setDACValueLow(myCMPSS0_zcd_BASE,0U);
//
// Configures the digital filter of the high comparator.
//
CMPSS_configFilterHigh(myCMPSS0_zcd_BASE, 0U, 1U, 1U);
//
// Configures the digital filter of the low comparator.
//
CMPSS_configFilterLow(myCMPSS0_zcd_BASE, 0U, 1U, 1U);
//
// Sets the output signal configuration for the high comparator.
//
CMPSS_configOutputsHigh(myCMPSS0_zcd_BASE,(CMPSS_TRIPOUT_ASYNC_COMP | CMPSS_TRIP_ASYNC_COMP));
//
// Sets the output signal configuration for the low comparator.
//
CMPSS_configOutputsLow(myCMPSS0_zcd_BASE,(CMPSS_TRIPOUT_ASYNC_COMP | CMPSS_TRIP_ASYNC_COMP));
//
// Sets the comparator hysteresis settings.
//
CMPSS_setHysteresis(myCMPSS0_zcd_BASE,0U);
//
// Configures the comparator subsystem's ramp generator.
//
CMPSS_configRamp(myCMPSS0_zcd_BASE,0U,0U,0U,1U,true);
//
// Disables reset of HIGH comparator digital filter output latch on PWMSYNC
//
CMPSS_disableLatchResetOnPWMSYNCHigh(myCMPSS0_zcd_BASE);
//
// Disables reset of LOW comparator digital filter output latch on PWMSYNC
//
CMPSS_disableLatchResetOnPWMSYNCLow(myCMPSS0_zcd_BASE);
//
// Sets the ePWM module blanking signal that holds trip in reset.
//
CMPSS_configBlanking(myCMPSS0_zcd_BASE,1U);
//
// Disables an ePWM blanking signal from holding trip in reset.
//
CMPSS_disableBlanking(myCMPSS0_zcd_BASE);
//
// Configures whether or not the digital filter latches are reset by PWMSYNC
//
CMPSS_configLatchOnPWMSYNC(myCMPSS0_zcd_BASE,false,false);
//
// Disables the CMPSS module.
//
CMPSS_disableModule(myCMPSS0_zcd_BASE);
//
// Delay for CMPSS DAC to power up.
//
DEVICE_DELAY_US(500);
}
//*****************************************************************************
//
// ECAP Configurations
//
//*****************************************************************************
void ECAP_init(){
myECAP0_init();
myECAP1_init();
}
void myECAP0_init(){
//
// Disable ,clear all capture flags and interrupts
//
ECAP_disableInterrupt(myECAP0_BASE,
(ECAP_ISR_SOURCE_CAPTURE_EVENT_1 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_2 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_3 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_4 |
ECAP_ISR_SOURCE_COUNTER_OVERFLOW |
ECAP_ISR_SOURCE_COUNTER_PERIOD |
ECAP_ISR_SOURCE_COUNTER_COMPARE));
ECAP_clearInterrupt(myECAP0_BASE,
(ECAP_ISR_SOURCE_CAPTURE_EVENT_1 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_2 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_3 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_4 |
ECAP_ISR_SOURCE_COUNTER_OVERFLOW |
ECAP_ISR_SOURCE_COUNTER_PERIOD |
ECAP_ISR_SOURCE_COUNTER_COMPARE));
//
// Disables time stamp capture.
//
ECAP_disableTimeStampCapture(myECAP0_BASE);
//
// Stops Time stamp counter.
//
ECAP_stopCounter(myECAP0_BASE);
//
// Sets eCAP in Capture mode.
//
ECAP_enableCaptureMode(myECAP0_BASE);
//
// Sets the capture mode.
//
ECAP_setCaptureMode(myECAP0_BASE,ECAP_CONTINUOUS_CAPTURE_MODE,ECAP_EVENT_4);
//
// Sets the Capture event prescaler.
//
ECAP_setEventPrescaler(myECAP0_BASE, 0U);
//
// Sets the Capture event polarity.
//
ECAP_setEventPolarity(myECAP0_BASE,ECAP_EVENT_1,ECAP_EVNT_RISING_EDGE);
ECAP_setEventPolarity(myECAP0_BASE,ECAP_EVENT_2,ECAP_EVNT_FALLING_EDGE);
ECAP_setEventPolarity(myECAP0_BASE,ECAP_EVENT_3,ECAP_EVNT_RISING_EDGE);
ECAP_setEventPolarity(myECAP0_BASE,ECAP_EVENT_4,ECAP_EVNT_FALLING_EDGE);
//
// Configure counter reset on events
//
ECAP_disableCounterResetOnEvent(myECAP0_BASE,ECAP_EVENT_1);
ECAP_disableCounterResetOnEvent(myECAP0_BASE,ECAP_EVENT_2);
ECAP_disableCounterResetOnEvent(myECAP0_BASE,ECAP_EVENT_3);
ECAP_disableCounterResetOnEvent(myECAP0_BASE,ECAP_EVENT_4);
//
// Select eCAP input.
//
ECAP_selectECAPInput(myECAP0_BASE,ECAP_INPUT_INPUTXBAR6);
//
// Sets a phase shift value count.
//
ECAP_setPhaseShiftCount(myECAP0_BASE,0U);
//
// Disable counter loading with phase shift value.
//
ECAP_disableLoadCounter(myECAP0_BASE);
//
// Configures Sync out signal mode.
//
ECAP_setSyncOutMode(myECAP0_BASE,ECAP_SYNC_OUT_SYNCI);
//
// Configures emulation mode.
//
ECAP_setEmulationMode(myECAP0_BASE,ECAP_EMULATION_STOP);
//
// Starts Time stamp counter for myECAP0.
//
ECAP_startCounter(myECAP0_BASE);
//
// Enables time stamp capture for myECAP0.
//
ECAP_enableTimeStampCapture(myECAP0_BASE);
//
// Re-arms the eCAP module for myECAP0.
//
ECAP_reArm(myECAP0_BASE);
}
void myECAP1_init(){
//
// Disable ,clear all capture flags and interrupts
//
ECAP_disableInterrupt(myECAP1_BASE,
(ECAP_ISR_SOURCE_CAPTURE_EVENT_1 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_2 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_3 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_4 |
ECAP_ISR_SOURCE_COUNTER_OVERFLOW |
ECAP_ISR_SOURCE_COUNTER_PERIOD |
ECAP_ISR_SOURCE_COUNTER_COMPARE));
ECAP_clearInterrupt(myECAP1_BASE,
(ECAP_ISR_SOURCE_CAPTURE_EVENT_1 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_2 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_3 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_4 |
ECAP_ISR_SOURCE_COUNTER_OVERFLOW |
ECAP_ISR_SOURCE_COUNTER_PERIOD |
ECAP_ISR_SOURCE_COUNTER_COMPARE));
//
// Disables time stamp capture.
//
ECAP_disableTimeStampCapture(myECAP1_BASE);
//
// Stops Time stamp counter.
//
ECAP_stopCounter(myECAP1_BASE);
//
// Sets eCAP in Capture mode.
//
ECAP_enableCaptureMode(myECAP1_BASE);
//
// Sets the capture mode.
//
ECAP_setCaptureMode(myECAP1_BASE,ECAP_CONTINUOUS_CAPTURE_MODE,ECAP_EVENT_4);
//
// Sets the Capture event prescaler.
//
ECAP_setEventPrescaler(myECAP1_BASE, 0U);
//
// Sets the Capture event polarity.
//
ECAP_setEventPolarity(myECAP1_BASE,ECAP_EVENT_1,ECAP_EVNT_RISING_EDGE);
ECAP_setEventPolarity(myECAP1_BASE,ECAP_EVENT_2,ECAP_EVNT_FALLING_EDGE);
ECAP_setEventPolarity(myECAP1_BASE,ECAP_EVENT_3,ECAP_EVNT_RISING_EDGE);
ECAP_setEventPolarity(myECAP1_BASE,ECAP_EVENT_4,ECAP_EVNT_FALLING_EDGE);
//
// Configure counter reset on events
//
ECAP_disableCounterResetOnEvent(myECAP1_BASE,ECAP_EVENT_1);
ECAP_disableCounterResetOnEvent(myECAP1_BASE,ECAP_EVENT_2);
ECAP_disableCounterResetOnEvent(myECAP1_BASE,ECAP_EVENT_3);
ECAP_disableCounterResetOnEvent(myECAP1_BASE,ECAP_EVENT_4);
//
// Select eCAP input.
//
ECAP_selectECAPInput(myECAP1_BASE,ECAP_INPUT_INPUTXBAR7);
//
// Sets a phase shift value count.
//
ECAP_setPhaseShiftCount(myECAP1_BASE,0U);
//
// Disable counter loading with phase shift value.
//
ECAP_disableLoadCounter(myECAP1_BASE);
//
// Configures Sync out signal mode.
//
ECAP_setSyncOutMode(myECAP1_BASE,ECAP_SYNC_OUT_SYNCI);
//
// Configures emulation mode.
//
ECAP_setEmulationMode(myECAP1_BASE,ECAP_EMULATION_STOP);
//
// Starts Time stamp counter for myECAP1.
//
ECAP_startCounter(myECAP1_BASE);
//
// Enables time stamp capture for myECAP1.
//
ECAP_enableTimeStampCapture(myECAP1_BASE);
//
// Re-arms the eCAP module for myECAP1.
//
ECAP_reArm(myECAP1_BASE);
}
//*****************************************************************************
//
// EPWM Configurations
//
//*****************************************************************************
void EPWM_init(){
EPWM_setClockPrescaler(myEPWM0_BASE, EPWM_CLOCK_DIVIDER_8, EPWM_HSCLOCK_DIVIDER_10);
EPWM_setTimeBasePeriod(myEPWM0_BASE, 12500);
EPWM_setTimeBaseCounter(myEPWM0_BASE, 0);
EPWM_setTimeBaseCounterMode(myEPWM0_BASE, EPWM_COUNTER_MODE_UP_DOWN);
EPWM_disablePhaseShiftLoad(myEPWM0_BASE);
EPWM_setPhaseShift(myEPWM0_BASE, 0);
EPWM_setCounterCompareValue(myEPWM0_BASE, EPWM_COUNTER_COMPARE_A, 6250);
EPWM_enableGlobalLoadRegisters(myEPWM0_BASE, EPWM_GL_REGISTER_CMPA_CMPAHR);
EPWM_setCounterCompareShadowLoadMode(myEPWM0_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareValue(myEPWM0_BASE, EPWM_COUNTER_COMPARE_B, 0);
EPWM_setCounterCompareShadowLoadMode(myEPWM0_BASE, EPWM_COUNTER_COMPARE_B, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_disableActionQualifierShadowLoadMode(myEPWM0_BASE, EPWM_ACTION_QUALIFIER_A);
EPWM_setActionQualifierShadowLoadMode(myEPWM0_BASE, EPWM_ACTION_QUALIFIER_A, EPWM_AQ_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
EPWM_disableActionQualifierShadowLoadMode(myEPWM0_BASE, EPWM_ACTION_QUALIFIER_B);
EPWM_setActionQualifierShadowLoadMode(myEPWM0_BASE, EPWM_ACTION_QUALIFIER_B, EPWM_AQ_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(myEPWM0_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
EPWM_setDeadBandDelayPolarity(myEPWM0_BASE, EPWM_DB_FED, EPWM_DB_POLARITY_ACTIVE_LOW);
EPWM_setDeadBandDelayMode(myEPWM0_BASE, EPWM_DB_RED, true);
EPWM_setRisingEdgeDelayCountShadowLoadMode(myEPWM0_BASE, EPWM_RED_LOAD_ON_CNTR_ZERO);
EPWM_disableRisingEdgeDelayCountShadowLoadMode(myEPWM0_BASE);
EPWM_setRisingEdgeDelayCount(myEPWM0_BASE, 2);
EPWM_setDeadBandDelayMode(myEPWM0_BASE, EPWM_DB_FED, true);
EPWM_setFallingEdgeDelayCountShadowLoadMode(myEPWM0_BASE, EPWM_FED_LOAD_ON_CNTR_ZERO);
EPWM_disableFallingEdgeDelayCountShadowLoadMode(myEPWM0_BASE);
EPWM_setFallingEdgeDelayCount(myEPWM0_BASE, 2);
EPWM_enableADCTrigger(myEPWM0_BASE, EPWM_SOC_A);
EPWM_setADCTriggerSource(myEPWM0_BASE, EPWM_SOC_A, EPWM_SOC_TBCTR_ZERO);
EPWM_setADCTriggerEventPrescale(myEPWM0_BASE, EPWM_SOC_A, 1);
EPWM_setClockPrescaler(myEPWM1_BASE, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_1);
EPWM_setTimeBasePeriod(myEPWM1_BASE, 999);
EPWM_enableGlobalLoadRegisters(myEPWM1_BASE, EPWM_GL_REGISTER_TBPRD_TBPRDHR);
EPWM_setTimeBaseCounter(myEPWM1_BASE, 0);
EPWM_setTimeBaseCounterMode(myEPWM1_BASE, EPWM_COUNTER_MODE_UP);
EPWM_disablePhaseShiftLoad(myEPWM1_BASE);
EPWM_setPhaseShift(myEPWM1_BASE, 0);
EPWM_setSyncOutPulseMode(myEPWM1_BASE, EPWM_SYNC_OUT_PULSE_ON_COUNTER_ZERO);
EPWM_setCounterCompareValue(myEPWM1_BASE, EPWM_COUNTER_COMPARE_A, 0);
EPWM_setCounterCompareShadowLoadMode(myEPWM1_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareValue(myEPWM1_BASE, EPWM_COUNTER_COMPARE_B, 492);
EPWM_setCounterCompareShadowLoadMode(myEPWM1_BASE, EPWM_COUNTER_COMPARE_B, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_disableActionQualifierShadowLoadMode(myEPWM1_BASE, EPWM_ACTION_QUALIFIER_A);
EPWM_setActionQualifierShadowLoadMode(myEPWM1_BASE, EPWM_ACTION_QUALIFIER_A, EPWM_AQ_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
EPWM_disableActionQualifierShadowLoadMode(myEPWM1_BASE, EPWM_ACTION_QUALIFIER_B);
EPWM_setActionQualifierShadowLoadMode(myEPWM1_BASE, EPWM_ACTION_QUALIFIER_B, EPWM_AQ_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(myEPWM1_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
EPWM_setDeadBandDelayPolarity(myEPWM1_BASE, EPWM_DB_FED, EPWM_DB_POLARITY_ACTIVE_LOW);
EPWM_setDeadBandDelayMode(myEPWM1_BASE, EPWM_DB_RED, true);
EPWM_setRisingEdgeDelayCountShadowLoadMode(myEPWM1_BASE, EPWM_RED_LOAD_ON_CNTR_ZERO);
EPWM_disableRisingEdgeDelayCountShadowLoadMode(myEPWM1_BASE);
EPWM_setRisingEdgeDelayCount(myEPWM1_BASE, 20);
EPWM_setDeadBandDelayMode(myEPWM1_BASE, EPWM_DB_FED, true);
EPWM_setFallingEdgeDelayCountShadowLoadMode(myEPWM1_BASE, EPWM_FED_LOAD_ON_CNTR_ZERO);
EPWM_disableFallingEdgeDelayCountShadowLoadMode(myEPWM1_BASE);
EPWM_setFallingEdgeDelayCount(myEPWM1_BASE, 20);
EPWM_enableGlobalLoadRegisters(myEPWM1_BASE, EPWM_GL_REGISTER_DBRED_DBREDHR);
EPWM_enableGlobalLoadRegisters(myEPWM1_BASE, EPWM_GL_REGISTER_DBFED_DBFEDHR);
EPWM_selectDigitalCompareTripInput(myEPWM1_BASE, EPWM_DC_TRIP_TRIPIN4, EPWM_DC_TYPE_DCAH);
EPWM_enableDigitalCompareSyncEvent(myEPWM1_BASE, EPWM_DC_MODULE_A);
EPWM_setClockPrescaler(myEPWM2_BASE, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_2);
EPWM_setTimeBasePeriod(myEPWM2_BASE, 999);
EPWM_setTimeBaseCounter(myEPWM2_BASE, 0);
EPWM_setTimeBaseCounterMode(myEPWM2_BASE, EPWM_COUNTER_MODE_UP);
EPWM_enablePhaseShiftLoad(myEPWM2_BASE);
EPWM_setPhaseShift(myEPWM2_BASE, 0);
EPWM_setSyncOutPulseMode(myEPWM2_BASE, EPWM_SYNC_OUT_PULSE_ON_EPWMxSYNCIN);
EPWM_setCounterCompareValue(myEPWM2_BASE, EPWM_COUNTER_COMPARE_A, 0);
EPWM_setCounterCompareShadowLoadMode(myEPWM2_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareValue(myEPWM2_BASE, EPWM_COUNTER_COMPARE_B, 492);
EPWM_setCounterCompareShadowLoadMode(myEPWM2_BASE, EPWM_COUNTER_COMPARE_B, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_disableActionQualifierShadowLoadMode(myEPWM2_BASE, EPWM_ACTION_QUALIFIER_A);
EPWM_setActionQualifierShadowLoadMode(myEPWM2_BASE, EPWM_ACTION_QUALIFIER_A, EPWM_AQ_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
EPWM_disableActionQualifierShadowLoadMode(myEPWM2_BASE, EPWM_ACTION_QUALIFIER_B);
EPWM_setActionQualifierShadowLoadMode(myEPWM2_BASE, EPWM_ACTION_QUALIFIER_B, EPWM_AQ_LOAD_ON_CNTR_ZERO);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_ZERO);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPA);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
EPWM_setActionQualifierAction(myEPWM2_BASE, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_NO_CHANGE, EPWM_AQ_OUTPUT_ON_TIMEBASE_DOWN_CMPB);
EPWM_setDeadBandDelayPolarity(myEPWM2_BASE, EPWM_DB_FED, EPWM_DB_POLARITY_ACTIVE_LOW);
EPWM_setDeadBandDelayMode(myEPWM2_BASE, EPWM_DB_RED, true);
EPWM_setRisingEdgeDelayCountShadowLoadMode(myEPWM2_BASE, EPWM_RED_LOAD_ON_CNTR_ZERO);
EPWM_disableRisingEdgeDelayCountShadowLoadMode(myEPWM2_BASE);
EPWM_setRisingEdgeDelayCount(myEPWM2_BASE, 20);
EPWM_setDeadBandDelayMode(myEPWM2_BASE, EPWM_DB_FED, true);
EPWM_setFallingEdgeDelayCountShadowLoadMode(myEPWM2_BASE, EPWM_FED_LOAD_ON_CNTR_ZERO);
EPWM_disableFallingEdgeDelayCountShadowLoadMode(myEPWM2_BASE);
EPWM_setFallingEdgeDelayCount(myEPWM2_BASE, 20);
EPWM_enableGlobalLoadRegisters(myEPWM2_BASE, EPWM_GL_REGISTER_DBRED_DBREDHR);
EPWM_enableGlobalLoadRegisters(myEPWM2_BASE, EPWM_GL_REGISTER_DBFED_DBFEDHR);
}
//*****************************************************************************
//
// EPWMXBAR Configurations
//
//*****************************************************************************
void EPWMXBAR_init(){
myEPWMXBAR0_init();
}
void myEPWMXBAR0_init(){
XBAR_setEPWMMuxConfig(myEPWMXBAR0, XBAR_EPWM_MUX00_CMPSS1_CTRIPH);
XBAR_enableEPWMMux(myEPWMXBAR0, XBAR_MUX00);
}
//*****************************************************************************
//
// GPIO Configurations
//
//*****************************************************************************
void GPIO_init(){
myGPIO_Relay_init();
}
void myGPIO_Relay_init(){
GPIO_setPadConfig(myGPIO_Relay, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(myGPIO_Relay, GPIO_QUAL_SYNC);
GPIO_setDirectionMode(myGPIO_Relay, GPIO_DIR_MODE_OUT);
GPIO_setControllerCore(myGPIO_Relay, GPIO_CORE_CPU1);
}
//*****************************************************************************
//
// INTERRUPT Configurations
//
//*****************************************************************************
void INTERRUPT_init(){
// Interrupt Settings for INT_myADCA_1
// ISR need to be defined for the registered interrupts
Interrupt_register(INT_myADCA_1, &INT_myADCA_1_ISR);
Interrupt_enable(INT_myADCA_1);
// Interrupt Settings for INT_myECAP0
// ISR need to be defined for the registered interrupts
Interrupt_register(INT_myECAP0, &ecap1ISR);
Interrupt_enable(INT_myECAP0);
// Interrupt Settings for INT_myECAP1
// ISR need to be defined for the registered interrupts
Interrupt_register(INT_myECAP1, &ecap2ISR);
Interrupt_enable(INT_myECAP1);
}
//*****************************************************************************
//
// SYNC Scheme Configurations
//
//*****************************************************************************
void SYNC_init(){
SysCtl_setSyncOutputConfig(SYSCTL_SYNC_OUT_SRC_EPWM1SYNCOUT);
//
// For EPWM1, the sync input is: SYSCTL_SYNC_IN_SRC_EXTSYNCIN1
//
SysCtl_setSyncInputConfig(SYSCTL_SYNC_IN_EPWM4, SYSCTL_SYNC_IN_SRC_EXTSYNCIN1);
SysCtl_setSyncInputConfig(SYSCTL_SYNC_IN_EPWM7, SYSCTL_SYNC_IN_SRC_EPWM1SYNCOUT);
SysCtl_setSyncInputConfig(SYSCTL_SYNC_IN_ECAP1, SYSCTL_SYNC_IN_SRC_EPWM1SYNCOUT);
SysCtl_setSyncInputConfig(SYSCTL_SYNC_IN_ECAP4, SYSCTL_SYNC_IN_SRC_EPWM1SYNCOUT);
SysCtl_setSyncInputConfig(SYSCTL_SYNC_IN_ECAP6, SYSCTL_SYNC_IN_SRC_EPWM1SYNCOUT);
//
// SOCA
//
SysCtl_enableExtADCSOCSource(0);
//
// SOCB
//
SysCtl_enableExtADCSOCSource(0);
}

