Part Number: DRV8262
大家好
设备使用DRV8262单H桥模式驱动电机,且配置如下:
原理图/配置:IN1与 MCU GPIO 相连、IN2与 GND 相连。 采用24V 电源时的开关频率为20kHz。
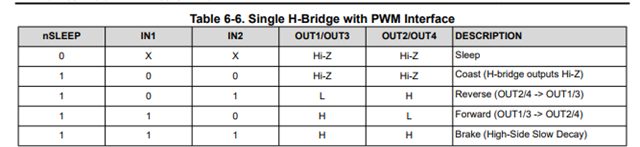
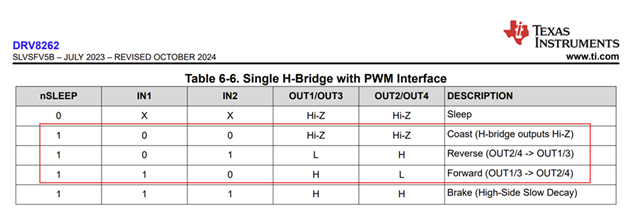
这意味着只能实现两个运行状态:正向和滑行(由于 IN2连接到 GND 并且始终为逻辑低电平)。
问题是:
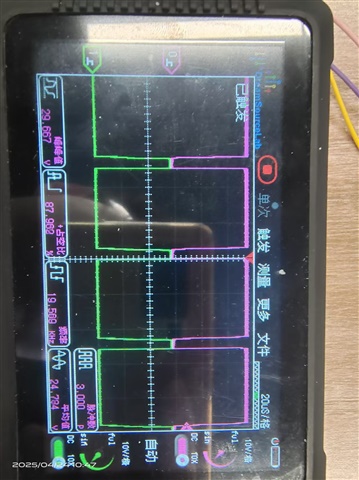
IN1使用PWM驱动电机的时候,OUT1则是与IN1的波形相同,但是OUT2则出现了与OUT1互补的波形。不太明白为什么OUT2会出现互补的波形,OUT2的高是谁引起的,是电机电感产生的电压吗?