
Other Parts Discussed in Thread: SYSBIOS, , TMS320C6748
TI的工程师,您好,我之前询问过几个有关SPI传输的问题,但有一些很重要的问题始终没有解决,我看了中英文几乎论坛上所有有关这方面的帖子,也分析了TI提供的例程,甚至也分析了有关这方面的底层的源码,依然没有办法实现SPI传输触发EDMA传输。
我查看了芯片手册有关的寄存器,并且在程序中也看到了相关的配置,但是还是没有找到解决方案。
现阶段的情况:
1、能够进行SPI轮询和中断方式传输,时钟频率为48Mhz。
2、不能使用EDMA传输,而所有寄存器都已正确配置,并且读取到的MCSPI_CHxSTAT寄存器的值为0x28,也就是符合触发EDMA的条件却没有触发。
3、使用的库版本为processor_sdk_rtos_am57xx_06_03_02_08。
4、将SPI_dma.c文件中的事件触发改为手动触发能够进行EDMA传输,但是传输的数据为重复的字节。
5、参考例程MCSPI_BasicExample_Dma_idkAM571x_c66TestProject。
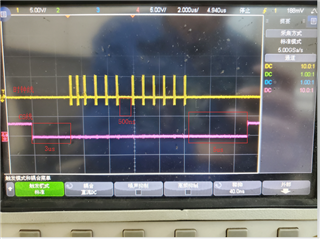
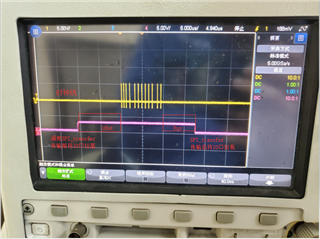
6、无论哪种方式传输,使用示波器测试出当调用MCSPI_transfer后,传输迟迟没有开始,间隔了10-20us后开始传输,在传输结束5-10us后CS才拉高,并且传输时每个字节之间有200ns-500ns的间隔,也就是说传输10个字节时整个过程的时间为30-50us。
目前的问题:
1、SPI传输事件不能触发EDMA的原因?
2、传输过程为何延迟会这么大?
部分测试代码如下:
/*********************************************************************
* 版权所有 (C)2022, 。
*
* 文件名称: // bsp_spi.c
* 文件标识: //
* 内容摘要: // spi驱动接口程序
* 其它说明: // 其它内容的说明
* 当前版本: // V1.0
* 作 者://
* 完成日期: // 20220208
*
* 修改记录1:// 修改历史记录,包括修改日期、修改者及修改内容
* 修改日期:
* 修 改 人:
* 修改内容:
* 修改记录2:…
**********************************************************************/
/* XDCtools 头文件 */
#include <xdc/std.h>
#include <xdc/cfg/global.h>
#include <xdc/runtime/System.h>
#include <stdio.h>
#include <ti/sysbios/knl/Task.h>
/* C libray 头文件 */
#include <string.h>
#include <stdio.h>
/* BIOS 头文件 */
#include <ti/sysbios/BIOS.h>
#include <xdc/runtime/Error.h>
#include <ti/sysbios/heaps/HeapMem.h>
#include <xdc/runtime/IHeap.h>
#include <xdc/runtime/Memory.h>
/* TI-RTOS 头文件 */
#include <ti/drv/spi/SPI.h>
#include <ti/drv/spi/soc/SPI_soc.h>
#include <ti/drv/spi/src/SPI_osal.h>
/* Board 头文件 */
#include <ti/drv/gpio/GPIO.h>
#include <ti/drv/gpio/soc/GPIO_v1.h>
#include <ti/board/board.h>
#include <ti/osal/CacheP.h>
#include <ti/osal/SemaphoreP.h>
#include <ti/csl/soc/am571x/src/cslr_soc.h>
/* EDMA3 头文件 */
#include <ti/sdo/edma3/drv/edma3_drv.h>
#include <ti/sdo/edma3/rm/edma3_rm.h>
#include <ti/sdo/edma3/rm/sample/bios6_edma3_rm_sample.h>
#include <bsp_spi.h>
/* MCSPI最大的通道实例 */
#define MCSPI_MAX_NUM_CHN (unsigned char)4
/* MCSPI缓冲大小 */
#define MCSPI_DATA_COUNT (unsigned int)1280
/* Mcspi 时钟频率 */
#define MCSPI_OUT_FREQ (unsigned int)48000000
#define MCSPI_IN_CLK (unsigned int)48000000
/* Mcspi 信息结构 */
typedef struct
{
T_MCSPI_INSTANCE tMcspiInstance; //MCSPI实例
MCSPI_Handle tMcspi; //MCSPI句柄
SemaphoreP_Handle tCbSem; //传输完成信号量
} T_MCSPI_INFO;
///*
// * 变量作用:MCSPI发送数据缓冲区
// * 变量范围:无
// * 访问说明:访问函数:xgMcspiTransfer,访问方法:赋值拷贝
// */
//static char __attribute__ ((aligned(128))) s_acTxBuff[MCSPI_DATA_COUNT ] = { "123456789" };
//
///*
// * 变量作用:MCSPI接收数据缓冲区
// * 变量范围:无
// * 访问说明:访问函数 xgMcspiTransfer,访问方法:赋值拷贝
// */
//static char __attribute__ ((aligned(128))) s_acRxBuff[MCSPI_DATA_COUNT ] = { 0 };
/*
* 变量作用:MCSPI发送数据缓冲区
* 变量范围:无
* 访问说明:访问函数:xgMcspiTransfer,访问方法:赋值拷贝
*/
#pragma DATA_ALIGN (s_acTxBuff,32)
char s_acTxBuff[MCSPI_DATA_COUNT ] = { "123456789" };
/*
* 变量作用:MCSPI接收数据缓冲区
* 变量范围:无
* 访问说明:访问函数 xgMcspiTransfer,访问方法:赋值拷贝
*/
#pragma DATA_ALIGN (s_acRxBuff,32)
char s_acRxBuff[MCSPI_DATA_COUNT ] = { 0 };
/*
* 变量作用:MCSPI结构信息
* 变量范围:无
* 访问说明:访问函数 getMcspiInfo,访问方法:查询tMcspiInstance并指向变量
* 访问函数 MCSPI1_callback,访问方法:释放tCbSem信号量
* 访问函数 MCSPI2_callback,访问方法:释放tCbSem信号量
* 访问函数 MCSPI3_callback,访问方法:释放tCbSem信号量
* 访问函数 MCSPI4_callback,访问方法:释放tCbSem信号量
*/
static T_MCSPI_INFO s_atMcspiInfo[MCSPI_MAX_NUM_CHN ] = {
{ MC_SPI1, NULL, NULL }, { MC_SPI2, NULL, NULL },
{ MC_SPI3, NULL, NULL }, { MC_SPI4, NULL, NULL }, };
static T_MCSPI_INFO* getMcspiInfo(T_MCSPI_INSTANCE tInstance);
static void MCSPI1_callback(MCSPI_Handle handle, SPI_Transaction *transaction);
static void MCSPI2_callback(MCSPI_Handle handle, SPI_Transaction *transaction);
static void MCSPI3_callback(MCSPI_Handle handle, SPI_Transaction *transaction);
static void MCSPI4_callback(MCSPI_Handle handle, SPI_Transaction *transaction);
static EDMA3_RM_Handle mcspiEdmaInit(T_MCSPI_INSTANCE tInstance);
/**********************************************************************
* 函数名称: // int xgMcspiTransfer(T_MCSPI_INSTANCE tInstance, void *pTxBuff,void *pRxBuff,uint32_t u32Count)
* 功能描述: // SPI数据传输
* 访问的表: //
* 修改的表: //
* 输入参数: // tInstance:SPI实例
* 输入参数: // pTxBuff:数据发送缓冲区
* 输入参数: // pRxBuff:数据接收缓冲区
* 输入参数: // u32Count:数据传输字节数
* 输出参数: //
* 返 回 值: // 传输状态 1:失败 0:成功
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
int xgMcspiTransfer(T_MCSPI_INSTANCE tInstance, void *pTxBuff, void *pRxBuff,
uint32_t u32Count)
{
int iRetVal = 0;
SemaphoreP_Status tSemStatus = SemaphoreP_OK;
SPI_Transaction tTransaction;
T_MCSPI_INFO *ptMcspiInfo = NULL;
uint32_t u32TransBytes = 0;
uint32_t u32RemainBytes = u32Count;
uint32_t u32Offset = 0;
/* 循环传输,直到SPI传输结束 */
do
{
if (u32RemainBytes > MCSPI_DATA_COUNT)
{
u32TransBytes = MCSPI_DATA_COUNT;
}
else
{
u32TransBytes = u32RemainBytes;
}
u32RemainBytes -= u32TransBytes;
/* 清空SPI DMA发送接收缓冲区 */
memset(s_acRxBuff, 0, u32TransBytes);
memset(s_acTxBuff, 0, u32TransBytes);
/* 拷贝发送缓冲区数据到DMA发送缓冲区 */
memcpy(s_acTxBuff, pTxBuff + u32Offset, u32TransBytes);
/* 获取MCSPI结构信息 */
ptMcspiInfo = getMcspiInfo(tInstance);
if (NULL == ptMcspiInfo)
{
iRetVal = 1;
System_printf("\n Error occurred in getMcspiInfo \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in getMcspiInfo \n");
}
if (NULL == ptMcspiInfo->tMcspi)
{
iRetVal = 1;
System_printf("\n ptMcspiInfo->tMcspi is null \n");
return (iRetVal);
}
else
{
/* 將cache的内容写入内存中 */
CacheP_wbInv((void*) s_acTxBuff, (int32_t) u32TransBytes);
CacheP_wbInv((void*) s_acRxBuff, (int32_t) u32TransBytes);
/* 指定MCSPI传输参数 */
tTransaction.status = SPI_TRANSFER_STARTED;
tTransaction.count = u32TransBytes;
tTransaction.txBuf = &s_acTxBuff[0];
tTransaction.rxBuf = &s_acRxBuff[0];
/* MCSPI传输 */
iRetVal = MCSPI_transfer(ptMcspiInfo->tMcspi, &tTransaction);
if (0 == iRetVal)
{
iRetVal = 1;
System_printf("\n Error occurred in MCSPI_transfer \n");
return (iRetVal);
}
else
{
iRetVal = 0;
System_printf("\n Succeed in MCSPI_transfer \n");
}
/* 使指定的Cache无效,读取时从内存中获取 */
CacheP_Inv((void*) s_acTxBuff, (int32_t) u32TransBytes);
CacheP_Inv((void*) s_acRxBuff, (int32_t) u32TransBytes);
if (NULL == ptMcspiInfo->tCbSem)
{
iRetVal = 1;
System_printf("\n ptMcspiInfo->tCbSem is null \n");
return (iRetVal);
}
else
{
/* 等待MCSPI传输完成 */
tSemStatus = SPI_osalPendLock(ptMcspiInfo->tCbSem,
SemaphoreP_WAIT_FOREVER);
if (SemaphoreP_OK != tSemStatus)
{
iRetVal = 1;
System_printf("\n Error occurred in SPI_osalPendLock \n");
return (iRetVal);
}
else
{
/* 拷贝DMA接收缓冲区数据到接收缓冲区 */
memcpy(pRxBuff + u32Offset, s_acRxBuff, u32TransBytes);
u32Offset += u32TransBytes;
System_printf("\n Succeed in in SPI_osalPendLock \n");
}
} /* end of if (NULL == ptMcspiInfo->tCbSem) */
} /* end of if (NULL == ptMcspiInfo->tMcspi) */
}
while (u32RemainBytes > 0);
return (iRetVal);
} /* end of xgMcspiTransfer () */
/**********************************************************************
* 函数名称: // int mcspiSocConfig(T_MCSPI_INSTANCE tInstance)
* 功能描述: // SPI SOC初始化配置
* 访问的表: //
* 修改的表: //
* 输入参数: // tInstance:SPI实例
* 输入参数: //
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 初始化状态 1:失败 0:成功
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
int mcspiSocConfig(T_MCSPI_INSTANCE tInstance)
{
int iRetVal = 0;
SPI_HWAttrs tSpiCfg;
EDMA3_RM_Handle tEdma = NULL;
/* 获取默认的SPI初始化配置 */
iRetVal = SPI_socGetInitCfg(tInstance, &tSpiCfg);
if (1 == iRetVal)
{
System_printf("\n Error occurred in SPI_socGetInitCfg \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in SPI_socGetInitCfg \n");
}
/* edma3初始化,获取edma句柄 */
tEdma = mcspiEdmaInit(tInstance);
if (NULL == tEdma)
{
iRetVal = 1;
System_printf("\n tEdma is null \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in mcspiEdmaInit \n");
}
/* 打开中断 */
tSpiCfg.enableIntr = false;
/* 设置与DMA相关的init配置 */
tSpiCfg.edmaHandle = tEdma;
tSpiCfg.dmaMode = true;
tSpiCfg.inputClkFreq = MCSPI_IN_CLK;
tSpiCfg.chnCfg[tInstance].dataLineCommMode = MCSPI_DATA_LINE_COMM_MODE_4;
// tSpiCfg.rxTrigLvl = 1;
// tSpiCfg.txTrigLvl = 1;
// tSpiCfg.edmaRxTC = 1;
// tSpiCfg.edmaTxTC = 1;
// tSpiCfg.edmaRxTCC = 1;
// tSpiCfg.edmaTxTCC = 1;
// tSpiCfg.rxDmaEventNumber = CSL_EDMA3_CHA1_MCSPI0_RX;
// tSpiCfg.txDmaEventNumber = CSL_EDMA3_CHA1_MCSPI0_TX;
// tSpiCfg.chNum = MCSPI_MULTI_CH;
/* 设置SPI的初始化配置 */
iRetVal = SPI_socSetInitCfg(tInstance, &tSpiCfg);
if (1 == iRetVal)
{
System_printf("\n Error occurred in SPI_socGetInitCfg \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in SPI_socSetInitCfg \n");
}
return (iRetVal);
}
/**********************************************************************
* 函数名称: // int mcspiInitConfig(T_MCSPI_INSTANCE tInstance)
* 功能描述: // SPI 初始化配置
* 访问的表: //
* 修改的表: //
* 输入参数: // tInstance:SPI实例
* 输入参数: //
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 初始化状态 1:失败 0:成功
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
MCSPI_Handle tMcspi = NULL;
int mcspiInitConfig(T_MCSPI_INSTANCE tInstance)
{
int iRetVal = 0;
MCSPI_Params tMcSpiParams;
SemaphoreP_Params tCbSemParams;
T_MCSPI_INFO *ptMcspiInfo = NULL;
MCSPI_CallbackFxn atCbFxn[MCSPI_MAX_NUM_CHN ] = { MCSPI1_callback,
MCSPI2_callback,
MCSPI3_callback,
MCSPI4_callback };
/* 设置SPI配置参数 */
MCSPI_Params_init(&tMcSpiParams);
tMcSpiParams.frameFormat = SPI_POL0_PHA0;
tMcSpiParams.transferTimeout = SemaphoreP_WAIT_FOREVER;
tMcSpiParams.bitRate = MCSPI_OUT_FREQ;
tMcSpiParams.dataSize = 8;
tMcSpiParams.mode = SPI_MASTER;
/* 获取MCSPI结构信息 */
ptMcspiInfo = getMcspiInfo(tInstance);
if (NULL == ptMcspiInfo)
{
iRetVal = 1;
System_printf("\n Error occurred in getMcspiInfo \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in getMcspiInfo \n");
}
/* 创建回调信号量 */
SPI_osalSemParamsInit(&tCbSemParams);
tCbSemParams.mode = SemaphoreP_Mode_BINARY;
ptMcspiInfo->tCbSem = SPI_osalCreateBlockingLock(0, &tCbSemParams);
if (NULL == ptMcspiInfo->tCbSem)
{
iRetVal = 1;
System_printf("\n Error occurred in SPI_osalCreateBlockingLock \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in SPI_osalCreateBlockingLock \n");
}
/* 设置MCSPI EDMA传输回调函数 */
// tMcSpiParams.transferCallbackFxn = atCbFxn[tInstance];
// tMcSpiParams.transferMode = SPI_MODE_CALLBACK;
tMcSpiParams.transferCallbackFxn = NULL;
tMcSpiParams.transferMode = SPI_MODE_BLOCKING;
/* 打开MCSPI实例 */
ptMcspiInfo->tMcspi = MCSPI_open(tInstance, tInstance,&tMcSpiParams);
if (NULL == ptMcspiInfo->tMcspi)
{
iRetVal = 1;
System_printf("\n Error occurred in MCSPI_open \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in MCSPI_open \n");
}
// McSPIStartBitDisable(0x48098000,0);
// McSPITurboModeEnable(0x48098000,0);
// McSPICSTimeControlSet(0x48098000,);
// McSPIStartBitEnable(0x48098000,0);
// Task_sleep(1000);
tMcspi = ptMcspiInfo->tMcspi;
return (iRetVal);
}
/**********************************************************************
* 函数名称: // int mcspiDeInitConfig(T_MCSPI_INSTANCE tInstance)
* 功能描述: // SPI 删除初始化配置
* 访问的表: //
* 修改的表: //
* 输入参数: // tInstance:SPI实例
* 输入参数: //
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 初始化状态 1:失败 0:成功
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
int mcspiDeInitConfig(T_MCSPI_INSTANCE tInstance)
{
int iRetVal = 0;
T_MCSPI_INFO *ptMcspiInfo = NULL;
/* 获取MCSPI结构信息 */
ptMcspiInfo = getMcspiInfo(tInstance);
if (NULL == ptMcspiInfo)
{
iRetVal = 1;
System_printf("\n Error occurred in getMcspiInfo \n");
return (iRetVal);
}
else
{
System_printf("\n Succeed in getMcspiInfo \n");
}
/* 关闭MCSPI实例 */
if (NULL == ptMcspiInfo->tMcspi)
{
iRetVal = 1;
System_printf("\n ptMcspiInfo->tMcspi is null \n");
return (iRetVal);
}
else
{
MCSPI_close(ptMcspiInfo->tMcspi);
ptMcspiInfo->tMcspi = NULL;
System_printf("\n Succeed in MCSPI_close \n");
}
/* 释放回调信号量 */
if (NULL == ptMcspiInfo->tCbSem)
{
iRetVal = 1;
System_printf("\n ptMcspiInfo->tCbSem is null \n");
return (iRetVal);
}
else
{
SPI_osalDeleteBlockingLock(ptMcspiInfo->tCbSem);
ptMcspiInfo->tCbSem = NULL;
System_printf("\n Succeed in SPI_osalDeleteBlockingLock \n");
}
return (iRetVal);
}
/**********************************************************************
* 函数名称: // static T_MCSPI_INFO *getMcspiInfo(T_MCSPI_INSTANCE tInstance)
* 功能描述: // 获取MCSPI结构信息
* 访问的表: //
* 修改的表: //
* 输入参数: // tInstance:SPI实例
* 输入参数: //
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 信息结构 NULL:失败 非空:成功
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
static T_MCSPI_INFO* getMcspiInfo(T_MCSPI_INSTANCE tInstance)
{
int i = 0;
for (i = 0; i < MCSPI_DATA_COUNT ; i++)
{
if (tInstance == s_atMcspiInfo[i].tMcspiInstance)
{
break;
}
else
{
continue;
}
}
if (i >= MCSPI_DATA_COUNT)
{
return NULL;
}
else
{
return &s_atMcspiInfo[i];
}
}
/**********************************************************************
* 函数名称: // static void MCSPI1_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
* 功能描述: // MCSPI1 EDMA回调函数
* 访问的表: //
* 修改的表: //
* 输入参数: // handle: MCSPI句柄
* 输入参数: // transaction: MCSPI传输参数
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 无
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
static void MCSPI1_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
{
/* 释放MCSPI传输完成信号量 */
SPI_osalPostLock(s_atMcspiInfo[MC_SPI1].tCbSem);
System_printf("\r\n MCSPI1_callback:%d\r\n", transaction->status);
}
/**********************************************************************
* 函数名称: // static void MCSPI2_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
* 功能描述: // MCSPI2 EDMA回调函数
* 访问的表: //
* 修改的表: //
* 输入参数: // handle: MCSPI句柄
* 输入参数: // transaction: MCSPI传输参数
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 无
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
static void MCSPI2_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
{
/* 释放MCSPI传输完成信号量 */
SPI_osalPostLock(s_atMcspiInfo[MC_SPI2].tCbSem);
System_printf("\r\n MCSPI2_callback:%d\r\n", transaction->status);
}
/**********************************************************************
* 函数名称: // static void MCSPI3_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
* 功能描述: // MCSPI3 EDMA回调函数
* 访问的表: //
* 修改的表: //
* 输入参数: // handle: MCSPI句柄
* 输入参数: // transaction: MCSPI传输参数
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 无
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
static void MCSPI3_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
{
/* 释放MCSPI传输完成信号量 */
SPI_osalPostLock(s_atMcspiInfo[MC_SPI3].tCbSem);
System_printf("\r\n MCSPI3_callback:%d\r\n", transaction->status);
}
/**********************************************************************
* 函数名称: // static void MCSPI4_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
* 功能描述: // MCSPI4 EDMA回调函数
* 访问的表: //
* 修改的表: //
* 输入参数: // handle: MCSPI句柄
* 输入参数: // transaction: MCSPI传输参数
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // 无
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
static void MCSPI4_callback(MCSPI_Handle handle, SPI_Transaction *transaction)
{
/* 释放MCSPI传输完成信号量 */
SPI_osalPostLock(s_atMcspiInfo[MC_SPI4].tCbSem);
System_printf("\r\n MCSPI4_callback:%d\r\n", transaction->status);
}
/**********************************************************************
* 函数名称: // static EDMA3_RM_Handle mcspiEdmaInit(T_MCSPI_INSTANCE tInstance)
* 功能描述: // edma3控制器初始化
* 访问的表: //
* 修改的表: //
* 输入参数: // tInstance: MCSPI实例
* 输入参数: //
* 输入参数: //
* 输入参数: //
* 输出参数: //
* 返 回 值: // edma3控制器句柄
* 其它说明: // 其它说明
* 修改日期 修改人 修改内容
* -----------------------------------------------
* 2022/02/16 XXXX
***********************************************************************/
EDMA3_RM_Handle tEdmaHandle = NULL;
static EDMA3_RM_Handle mcspiEdmaInit(T_MCSPI_INSTANCE tInstance)
{
uint32_t u32Edma3Id = 0;
EDMA3_DRV_Result tEdmaResult = EDMA3_DRV_E_INVALID_PARAM;
/* edma3控制器初始化 */
u32Edma3Id = 1;
tEdmaHandle = (EDMA3_RM_Handle) edma3init(u32Edma3Id, &tEdmaResult);
if (tEdmaResult != EDMA3_DRV_SOK)
{
System_printf("\nError occurred in edma3init\n");
return NULL;
}
else
{
System_printf("\n Succeed in edma3init \n");
}
System_printf("\n tEdmaHandle:%p \n",tEdmaHandle);
return (tEdmaHandle);
}
void spitestInit(void)
{
int status = 0;
T_MCSPI_INSTANCE tInstance = MC_SPI1;
status = mcspiSocConfig(tInstance);
if (0 != status)
return;
status = mcspiInitConfig(tInstance);
if (0 != status)
return;
}
void spi_lld_test(void)
{
int status = 0;
unsigned int i = 0, timecnt = 0;
char *txBuff = NULL;
char *rxBuff = NULL;
char tmp[10];
uint32_t u32Count = 128;
T_MCSPI_INSTANCE tInstance = MC_SPI1;
txBuff = malloc(u32Count * 5);
rxBuff = malloc(u32Count * 5);
memset(tmp, 0, 10);
memset(txBuff, 0, u32Count * 5);
memset(rxBuff, 0, u32Count * 5);
System_printf("\n malloc, txBuff addr:%p,rxBuff addr:%p\n", txBuff, rxBuff);
for (i = 0; i < u32Count; i++)
{
sprintf(tmp, "%x", i & 0xf);
strcat(txBuff, tmp);
memset(tmp, 0, 10);
}
sprintf(tmp, " end i:%d\r\n\r\n", i);
strcat(txBuff, tmp);
status = mcspiSocConfig(tInstance);
if (0 != status)
return;
status = mcspiInitConfig(tInstance);
if (0 != status)
return;
while(1) {
spiIntTranstest();
// Task_sleep(1);
}
// timecnt = 1;
// do
// {
// memset(rxBuff, 0, u32Count + 64);
// status = xgMcspiTransfer(tInstance, txBuff, rxBuff, u32Count + 64);
// if (0 != status)
// return;
// System_printf("\r\n txBuff:%s\r\n rxBuff:%s\r\n transCount:%d\r\n",
// &txBuff[0], &rxBuff[0], u32Count + 64);
// GPIO_toggle(0);
// Task_sleep(1);
// }
// while (timecnt);
}
SPI_Transaction tTransactions;
void spiIntTranstest(void)
{
T_MCSPI_INFO *ptMcspiInfo = &s_atMcspiInfo[0];
T_MCSPI_INSTANCE tInstance = MC_SPI1;
int iRetVal;
static unsigned int cnt = 0;
unsigned int u32TransBytes = 128;
if (NULL == tMcspi)
{
return;
}
uint32_t *spirxreg = 0x4809813c;
uint32_t *spitxreg = 0x48098138;
System_printf("\r\n spirxreg:%x\r\n spitxreg:%x\r\n ",
spirxreg[0], spitxreg[0]);
tTransactions.status = SPI_TRANSFER_STARTED;
tTransactions.count = u32TransBytes;
tTransactions.txBuf = &s_acTxBuff[0];
tTransactions.rxBuf = &s_acRxBuff[0];
/* 將cache的内容写入内存中 */
CacheP_wbInv((void*) s_acTxBuff, (int32_t) u32TransBytes);
CacheP_wbInv((void*) s_acRxBuff, (int32_t) u32TransBytes);
// GPIO_toggle(0);
GPIO_write(0, 1); //熄灭 高
uint32_t xferEnable = 1;
int isss = 0;
// isss = MCSPI_control(tMcspi,32,(void *) &xferEnable);
// System_printf("\n MCSPI_control %d\n",isss);
/* MCSPI传输 */
iRetVal = MCSPI_transfer(tMcspi, &tTransactions);
if (0 == iRetVal)
{
tMcspi = NULL;
System_printf("MCSPI_transfer err!\n");
return;
}
// xferEnable = 0;
// isss = MCSPI_control(tMcspi,32,&xferEnable);
// System_printf("\n MCSPI_control %d\n",isss);
GPIO_write(0, 0); //点亮低
/* 使指定的Cache无效,读取时从内存中获取 */
CacheP_Inv((void*) s_acTxBuff, (int32_t) u32TransBytes);
CacheP_Inv((void*) s_acRxBuff, (int32_t) u32TransBytes);
System_printf("\r\n s_acTxBuff:%s\r\n s_acRxBuff:%s\r\n ",
&s_acTxBuff[0], &s_acRxBuff[0]);
//
//
System_printf("\r\n spirxreg:%x\r\n spitxreg:%x\r\n ",
spirxreg[0], spitxreg[0]);
}
cfg文件如下:
//BWC, add Program var
/* root of the configuration object model */
var Program = xdc.useModule('xdc.cfg.Program');
/* ================ General configuration ================ */
var Memory = xdc.useModule('xdc.runtime.Memory');
var HeapMem = xdc.useModule('ti.sysbios.heaps.HeapMem');
var HeapBuf = xdc.useModule('ti.sysbios.heaps.HeapBuf');
var Log = xdc.useModule('xdc.runtime.Log');
var Task = xdc.useModule('ti.sysbios.knl.Task');
var Semaphore = xdc.useModule('ti.sysbios.knl.Semaphore');
var Hwi = xdc.useModule('ti.sysbios.family.c64p.Hwi');
var ECM = xdc.useModule('ti.sysbios.family.c64p.EventCombiner');
var System = xdc.useModule('xdc.runtime.System');
SysStd = xdc.useModule('xdc.runtime.SysStd');
var IntXbar = xdc.useModule('ti.sysbios.family.shared.vayu.IntXbar');
var halCache = xdc.useModule('ti.sysbios.hal.Cache');
var Idle = xdc.useModule('ti.sysbios.knl.Idle');
var Deh = xdc.useModule('ti.deh.Deh');
var Timer = xdc.useModule('ti.sysbios.hal.Timer');
var Clock = xdc.useModule('ti.sysbios.knl.Clock');
var ti_sysbios_timers_dmtimer_Timer = xdc.useModule('ti.sysbios.timers.dmtimer.Timer');
/* application uses the following modules and packages */
xdc.useModule('xdc.runtime.Assert');
xdc.useModule('xdc.runtime.Error');
/* Must be placed before pwr mgmt */
Idle.addFunc('&ti_deh_Deh_idleBegin');
System.SupportProxy = SysStd;
/*
* Enable Event Groups here and registering of ISR for specific GEM INTC is done
* using EventCombiner_dispatchPlug() and Hwi_eventMap() APIs
*/
var exception = xdc.useModule('ti.sysbios.family.c64p.Exception');
exception.enablePrint = true;
/* ================ BIOS configuration ================ */
var BIOS = xdc.useModule('ti.sysbios.BIOS');
/* Enable BIOS Task Scheduler */
BIOS.taskEnabled = true;
BIOS.heapSize = 0x300000;
BIOS.heapSection = "systemHeap";
BIOS.addUserStartupFunction('&IpcMgr_ipcStartup');
/* ================ Task configuration ================ */
/* No runtime stack checking is performed */
Task.checkStackFlag = false;
/* Reduce the number of task priorities */
Task.numPriorities = 16;
Task.common$.namedInstance = true;
/* ================ Driver configuration ================ */
/* Load the Osal package */
var osType = "tirtos";
var Osal = xdc.loadPackage('ti.osal');
Osal.Settings.osType = osType;
/*use CSL package*/
var socType = "am571x";
var Csl = xdc.loadPackage('ti.csl');
Csl.Settings.deviceType = socType;
/* Load the gpio package */
var GPIO = xdc.loadPackage('ti.drv.gpio');
GPIO.Settings.socType = socType;
/* Load the UART package */
var Uart = xdc.loadPackage('ti.drv.uart');
/* Load the I2C package */
var I2c = xdc.loadPackage('ti.drv.i2c');
/* Load the SPI package */
var Spi = xdc.loadPackage('ti.drv.spi');
Spi.Settings.socType = socType;
Spi.Settings.useDma = "true";
/* Load the Board package and set the board name */
var Board = xdc.loadPackage('ti.board');
Board.Settings.boardName = "idkAM571x";
/* root of the configuration object model */
var Program = xdc.useModule('xdc.cfg.Program');
/* load the configuration shared across cores */
Program.global.procName = "DSP1";
Program.sectMap[".tracebuf"] = "TRACE_BUF";
Program.sectMap[".errorbuf"] = "EXC_DATA";
/*
* ======== IPC Configuration ========
*/
xdc.useModule('ti.ipc.ipcmgr.IpcMgr');
var ipc_cfg = xdc.loadCapsule("ipc.cfg.xs");
/*
* ======== SYS/BIOS Configuration ========
*/
if (Program.build.profile == "debug")
{
BIOS.libType = BIOS.LibType_Debug;
}
else
{
BIOS.libType = BIOS.LibType_Custom;
}
/* create a heap for MessageQ messages */
var params = new HeapBuf.Params;
params.align = 8;
params.blockSize = 512;
params.numBlocks = 256;
var msgHeap = HeapBuf.create(params);
var MessageQ = xdc.useModule('ti.sdo.ipc.MessageQ');
MessageQ.registerHeapMeta(msgHeap, 0);
/* Setup MessageQ transport */
var VirtioSetup = xdc.useModule('ti.ipc.transports.TransportRpmsgSetup');
MessageQ.SetupTransportProxy = VirtioSetup;
/* Setup NameServer remote proxy */
var NameServer = xdc.useModule("ti.sdo.utils.NameServer");
var NsRemote = xdc.useModule("ti.ipc.namesrv.NameServerRemoteRpmsg");
NameServer.SetupProxy = NsRemote;
/* Enable Memory Translation module that operates on the BIOS Resource Table */
var Resource = xdc.useModule('ti.ipc.remoteproc.Resource');
Resource.loadSegment = "EXT_CODE";
Resource.customTable = true;
/* Use SysMin because trace buffer address is required for Linux/QNX
* trace debug driver, plus provides better performance.
*/
var System = xdc.useModule('xdc.runtime.System');
var SysMin = xdc.useModule('ti.trace.SysMin');
System.SupportProxy = SysMin;
SysMin.bufSize = 0x8000;
/*
* ======== Instrumentation Configuration ========
*/
/* system logger */
var LoggerSys = xdc.useModule('xdc.runtime.LoggerSys');
var LoggerSysParams = new LoggerSys.Params();
var Defaults = xdc.useModule('xdc.runtime.Defaults');
Defaults.common$.logger = LoggerSys.create(LoggerSysParams);
/* enable runtime Diags_setMask() for non-XDC spec'd modules */
var Diags = xdc.useModule('xdc.runtime.Diags');
Diags.setMaskEnabled = true;
/* override diags mask for selected modules */
xdc.useModule('xdc.runtime.Main');
Diags.setMaskMeta("xdc.runtime.Main",
Diags.ENTRY | Diags.EXIT | Diags.INFO, Diags.RUNTIME_ON);
var Registry = xdc.useModule('xdc.runtime.Registry');
Registry.common$.diags_ENTRY = Diags.RUNTIME_OFF;
Registry.common$.diags_EXIT = Diags.RUNTIME_OFF;
Registry.common$.diags_INFO = Diags.RUNTIME_OFF;
Registry.common$.diags_USER1 = Diags.RUNTIME_OFF;
Registry.common$.diags_LIFECYCLE = Diags.RUNTIME_OFF;
Registry.common$.diags_STATUS = Diags.RUNTIME_OFF;
var Main = xdc.useModule('xdc.runtime.Main');
Main.common$.diags_ASSERT = Diags.ALWAYS_ON;
Main.common$.diags_INTERNAL = Diags.ALWAYS_ON;
/* Override the default resource table with my own */
var Resource = xdc.useModule('ti.ipc.remoteproc.Resource');
Resource.customTable = true;
ti_sysbios_timers_dmtimer_Timer.timerSettings[4].intNum = 11;
var timer0Params = new Timer.Params();
timer0Params.instance.name = "timer0";
timer0Params.period = 5;
timer0Params.periodType = xdc.module("ti.sysbios.interfaces.ITimer").PeriodType_MICROSECS;
timer0Params.extFreq.lo = 20000000;
timer0Params.runMode = xdc.module("ti.sysbios.interfaces.ITimer").RunMode_CONTINUOUS;
timer0Params.arg = 200;
Program.global.timer0 = Timer.create(4, "&TimerFxn", timer0Params);
Clock.tickSource = Clock.TickSource_USER;
Clock.tickPeriod = 1000;
/* ================ Driver configuration ================ */
var drv = xdc.loadPackage ("ti.sdo.edma3.drv");
var rm = xdc.loadPackage ("ti.sdo.edma3.rm");
var rm = xdc.loadPackage ("ti.sdo.edma3.drv.sample");
BIOS.cpuFreq.lo = 750000000;
ECM.eventGroupHwiNum[0] = 7;
ECM.eventGroupHwiNum[1] = 8;
ECM.eventGroupHwiNum[2] = 9;
ECM.eventGroupHwiNum[3] = 10;
部分测试结果如下:
期待您的回复,谢谢!