HI all,
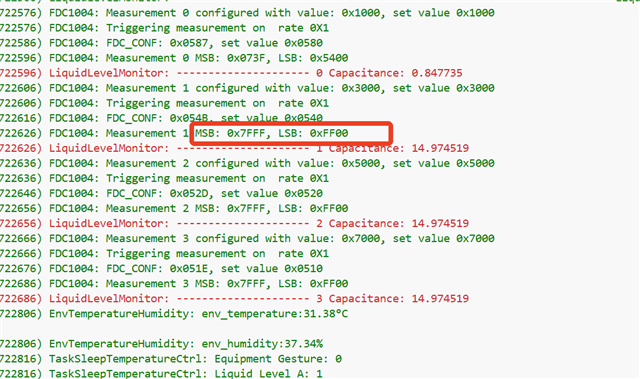
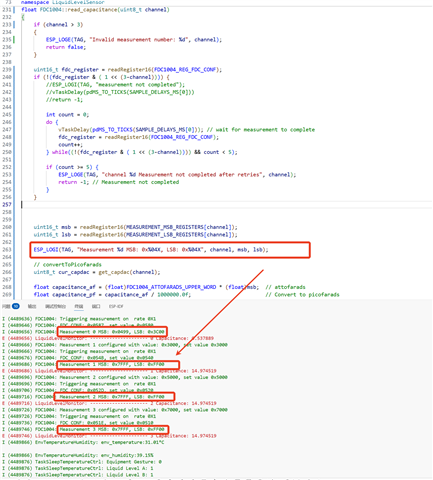
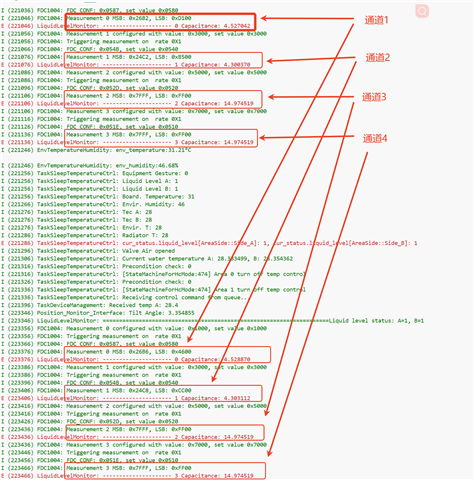
I am new to FDC1004, i am using FDC1004 with ESP-32 with I2C in single measurement mode. But MEAS*_MSB registers always returns fixed value0X7FFF. My code is same as the related question:
FDC1004 returns fixed value - Sensors forum - Sensors - TI E2E support forums