


Other Parts Discussed in Thread: SYSCONFIG, LAUNCHXL-CC26X2R1
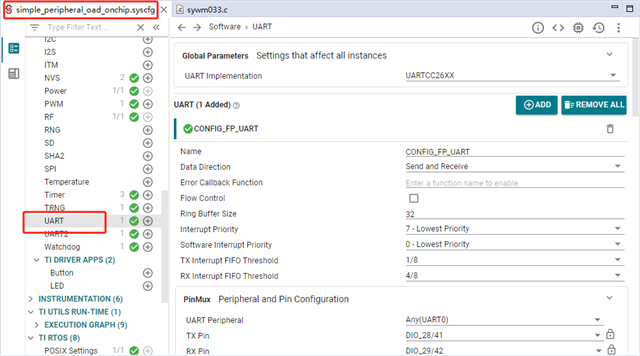
我在使用ccs的配置工具配置完串口1时并未找到波特率和回调函数相关的配置,同时想问串口如果初始化相关的函数名称是什么.
望解答
Original question:

我在使用ccs的配置工具配置完串口1时并未找到波特率和回调函数相关的配置,同时想问串口如果初始化相关的函数名称是什么.
望解答

 ,
,