请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F2800156-Q1 工具/软件:
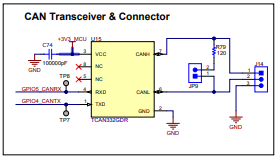
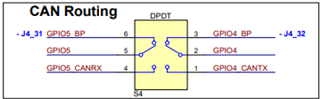
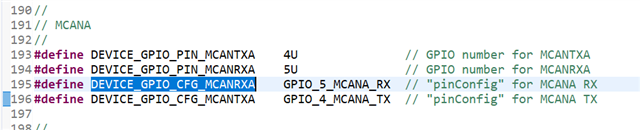
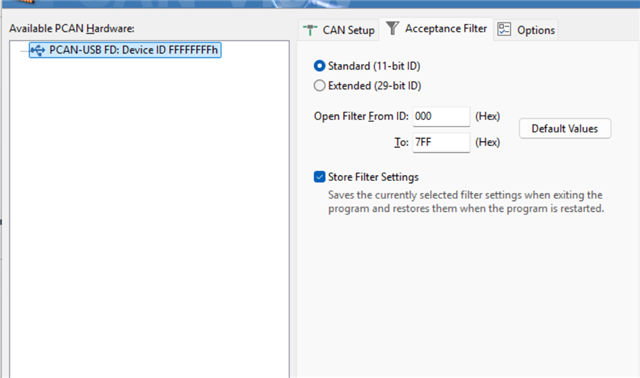
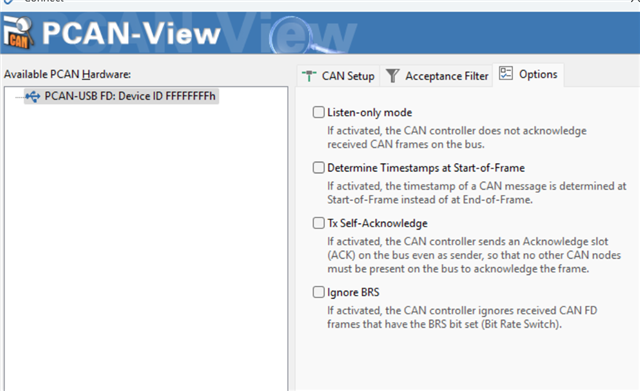
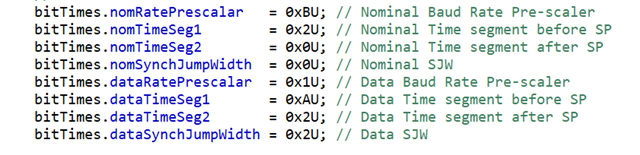
我目前正在为一个 PMSM 控制器工程设计 F2800156-Q1 (32引脚)微控制器。 我们正在使用 bitfield 格式开发代码。 我已将引脚27 (GPIO1)配置为 MCAN_TX、将引脚28 (GPIO0)配置为 MCAN_RX。 但是、我无法找到任何位字段格式的 MCAN 示例代码。 请共享 C2000控制器的任何 MCAN 示例代码。