

Other Parts Discussed in Thread: BOOSTXL-3PHGANINV, CONTROLSUITE
器件型号: TMS320F280034
主题中讨论的其他器件: BOOSTXL-3PHGANINV、 controlSUITE
您好:
我正在使用 F280039 LaunchPad 和 BOOSTXL-3PHGANINV 并运行 通用项目 控制文件。 控制器类型 霍尔效应传感器 相同。
我遵循了建议的程序并运行 FAST 和霍尔传感器 来校准霍尔传感器。 我获得的估算电相看起来与非常相似 SPRUJ26A 中的图 3-51 “我知道了。 不会 有电机规格(尤其是 USER_MOTOR1_RATED_FLUX_VpHz)、我不确定校准是否正确。
我附上了估计阶段的屏幕截图。
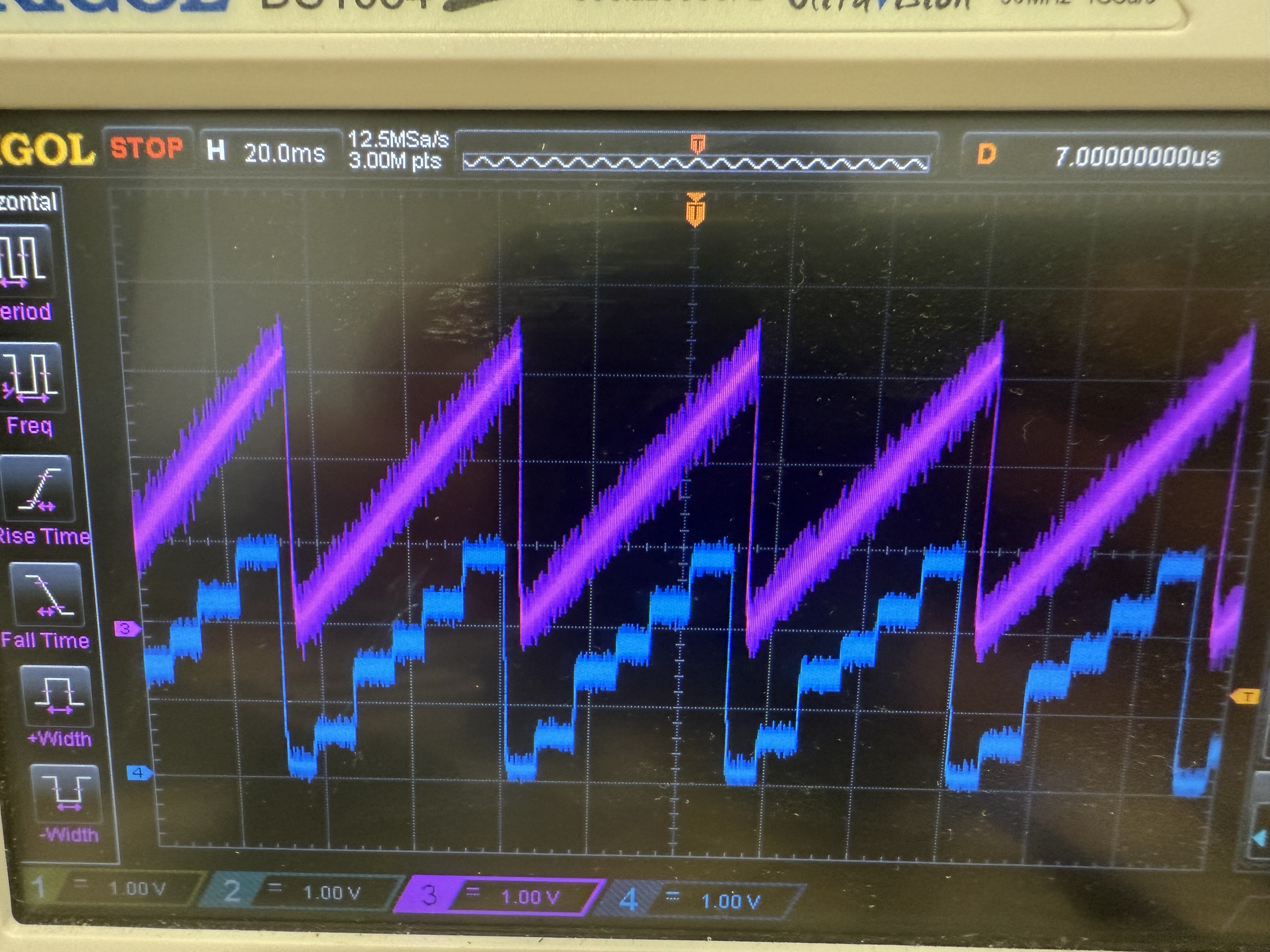
您能否请检查霍尔校准看起来是否正确?
构建级别 3–电流稳压器调优
指定 构建级别 3 、图 3-43 提到:
“对电流稳压器的这些 Kp 或 Ki 进行调优、以实现所需的响应。“
目前、我不确定应该如何调整这些增益。 电机旋转、但我不知道电流环路是否得到正确调整、或者是否需要进一步调整 KP/KI。
能否请您介绍一下正确的调优过程 电流 (ID/IQ) PI 控制器 构建级别 3 中?
制造级别 4 — 电机不稳定
工作 构建级别 4 、则系统变得不稳定。
电机突然以更高的速度旋转、如所示 相反方向 。 这仅发生在级别 4—级别 3 运行正常。
您能解释一下通常导致此行为的原因以及我应该检查的内容吗?
(例如:估算器角度,符号约定,速度环路增益或任何其他可能导致反转和不稳定的因素。)
其他信息
-
硬件:F280039 LaunchPad + BOOSTXL-3PHGANINV
-
项目:通用项目 (MotorControl SDK)
-
传感器类型:3 个霍尔效应传感器
-
电机:未知参数(无数据表)
-
问题:不确定霍尔校准;不清楚 KP/KI 调优;构建级别 4 处的不稳定
非常感谢您的帮助。
