请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMDSHVMTRINSPIN 主题中讨论的其他部件:MOTORWARE, INSTASPIN-BLDC
您好,我一直试图让电机达到其额定转速和扭矩,但没有运气。 我正在使用高压马达套件,带有安装销,并为其提供200 VDC电源。 电机是一个4极BLDC,目标设计额定值为0.8 Nm,转速为8000 rpm,5.0 安培,200 VDC。
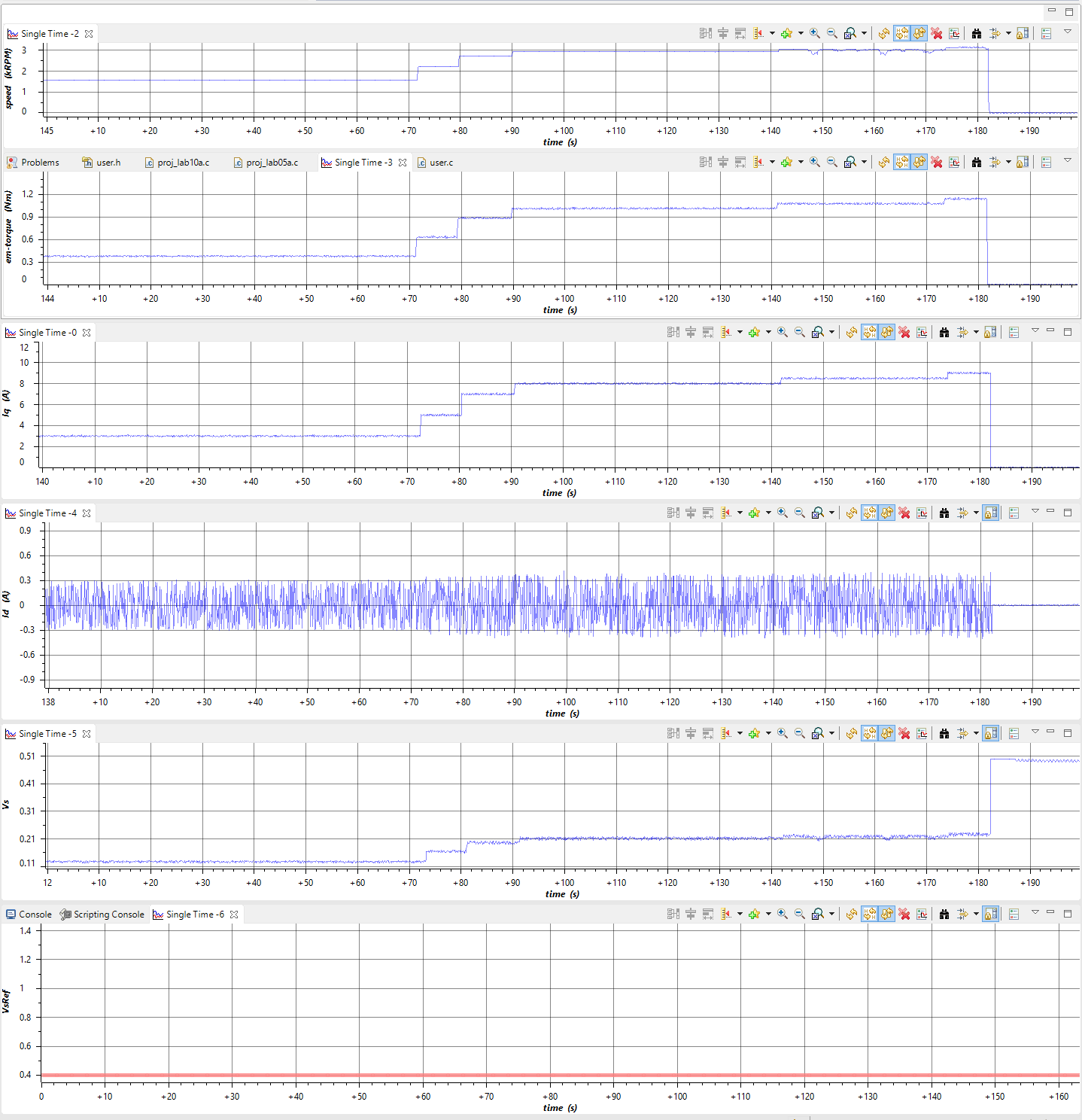
我也很难相信哪种电流读数是正确的参考值;当套件跳闸时,我的电源显示1.8 A。 我有一个钳位电流表,它位于连接电机的3个相位中的一个,它显示在6 A左右,而通过CCS调试器,它显示9.0 A和更高。 此时,电动机仅在安装销的em扭矩读数为1.1 Nm时达到2200 rpm。 我在下面附上了我的user.h,并在下面附上了图表。
所以我一直在尝试寻找减少损失的方法,例如减少user.h中的Rs_est_current和LS_est_current,但我在instaspin指南中看到它们在运动ID期间使用。 它们是否专为马达ID而使用? 我也尝试过将USER_MOTOR_max_current增加到15.0 A,但套件仍在同一位置跳闸。 这是使用instaspin实验10a。
谢谢!
Scott