请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F28069M 大家好、
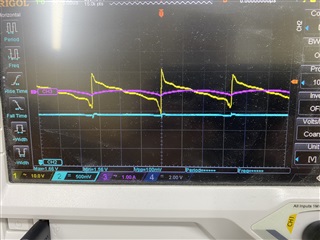
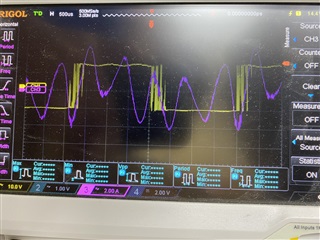
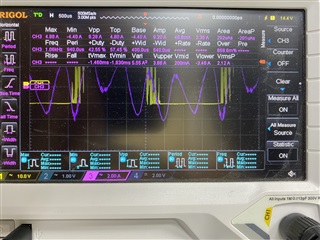
目前、我们使用实验5A 和电动自行车 BLDC 集线器电机24V、20极、250额定功率。 我们将面临所附图片中所示的高电流纹波。
此外、我附加了 user.h 文件。 除了表面贴装磁体之外,它的行为是否正常? 我是否可以进一步调节以减少纹波?
 e2e.ti.com/.../3755.user_5F00_j1.h
e2e.ti.com/.../3755.user_5F00_j1.h
等待您回复、
此致、
Georgi Gospodinov