Other Parts Discussed in Thread: MOTORWARE
主题中讨论的其他器件:MOTORWARE
嗨、Expert,
很高兴与您交谈。
F28054M-Q1正由客户侧进行评估。 此应用是制动系统的电机控制器。 以下是该客户的背景信息:
1. MCU 平台:F280054M-Q1
2. CCS 版本: 10.4.0.00006
3. MotorWare 版本: motorware_1_01_00_18 (__LW_AT__instaspin-Motion)
4、电机信息:电压: 600V ;最大速度: 3500rpm;极对: 8
5.问题描述:
当电机转速为3600rpm 时。 所有功能都正常;
当电机转速增加到3700rpm 时、电机转速 gMotorVars.Speed_KRPM 从 Iq (3.7)更改为 Iq (-3.1)。 它导致 PID 失控;
为了验证该问题不是由编码器引起的、 我们将编码器线从1024更改为512、问题仍然存在。
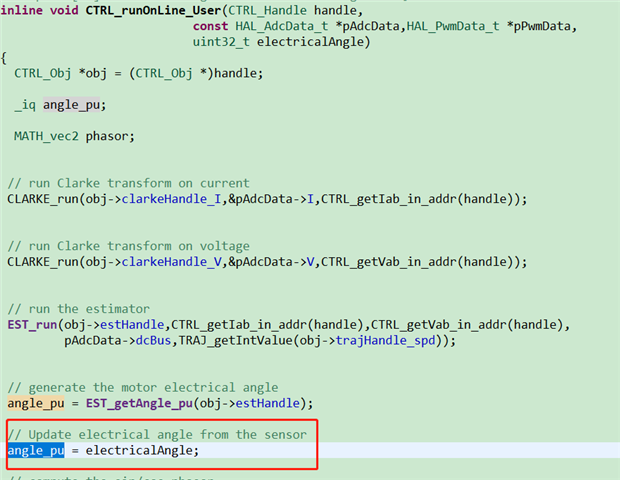
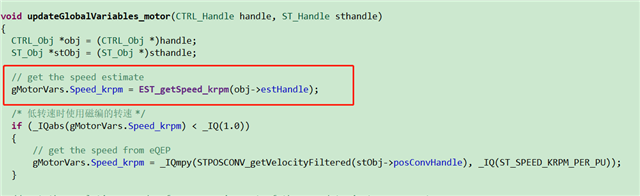
因此、客户确认此问题是由 QEP 样片引起的、因此他们将 QEP 更改为 用于测量速度的观测器、以替代 QEP。 因此、软件开始运行良好。 以下是观测器的代码:
//获取速度估算值
gMotorVars.Speed_krpm = EST_getSpeed_krpm (obj->estHandle);
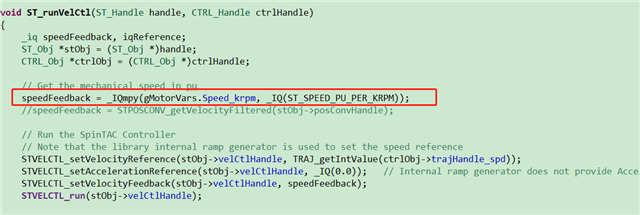
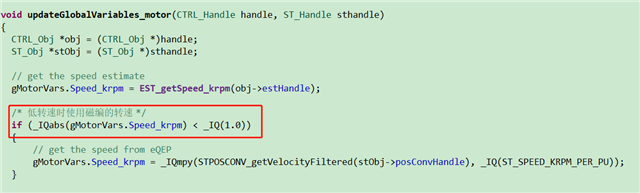
客户还共享 QEP 代码:
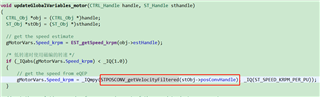
//从 eQEP 获取速度
gMotorVars.Speed_KRPM =_IQmpy (STPOSCONV_getVelocityFiltered (stObj->posConvHandle)、_IQ (ST_SPEED_KRPM_PER_PU));
对于 QEP 旋转速度采集、客户调用下图红色框中的函数:
下面是原始代码:
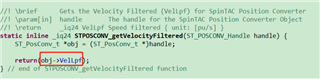
6.支持需求
您能否共享用红线标记的函数的原始代码? 因此客户可以找到此问题的详细原因。
此致
郭松珍