请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP87745-Q1 主题中讨论的其他器件: TCAN1043
工具与软件:
您好!
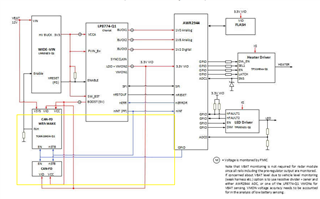
下图来自 LP87745-Q1的《功能安全手册》修订版 A (2022年11月)。
如果我们使用 nINT 通过 nSTB 禁用 CAN PHY、我会感到困惑、因为 TCAN1043 转换到进入睡眠模式、最终更改为睡眠 模式、INH 引脚进入高阻抗状态。
然后、雷达电源将被禁用、 此 程序是否正确?
谢谢。