If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
InitI2CGpio()
{
EALLOW;
//
// Enable internal pull-up for the selected pins
// Pull-ups can be enabled or disabled disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
//
GpioCtrlRegs.GPBPUD.bit.GPIO32 = 0; // Enable pull-up for GPIO32 (SDAA)
GpioCtrlRegs.GPBPUD.bit.GPIO33 = 0; // Enable pull-up for GPIO33 (SCLA)
//
// Set qualification for selected pins to asynch only
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
//
GpioCtrlRegs.GPBQSEL1.bit.GPIO32 = 3; // Asynch input GPIO32 (SDAA)
GpioCtrlRegs.GPBQSEL1.bit.GPIO33 = 3; // Asynch input GPIO33 (SCLA)
//
// Configure SCI pins using GPIO regs
// This specifies which of the possible GPIO pins will be I2C functional
// pins. Comment out other unwanted lines.
//
GpioCtrlRegs.GPBMUX1.bit.GPIO32 = 1; // Configure GPIO32 to SDAA
GpioCtrlRegs.GPBMUX1.bit.GPIO33 = 1; // Configure GPIO33 to SCLA
EDIS;
}
4. I2C初始化
void I2CA_Init(Uint16 iSlaveAddress,CommunicateSpeed_Enum eCommunicateSpeed)
{
//IRS must be 0 while you configure/reconfigure the i2c module
I2caRegs.I2CMDR.bit.IRS = 0;
// Initialize I2C
I2caRegs.I2CSAR = iSlaveAddress; // Slave address
// Configure I2C Module Clock
#if (CPU_FRQ_150MHZ) // Default - For 150MHz SYSCLKOUT
I2caRegs.I2CPSC.all = 13; // Prescaler - need 7-12 Mhz on module clk (150/15 = 10MHz)
#endif
#if (CPU_FRQ_100MHZ) // For 100 MHz SYSCLKOUT
I2caRegs.I2CPSC.all = 9; // Prescaler - need 7-12 Mhz on module clk (100/10 = 10MHz)
#endif
// Configure Communicate Speed
if ( CommunicateSpeed_100K == eCommunicateSpeed )
{
I2caRegs.I2CCLKL = 60; // NOTE: must be non zero
I2caRegs.I2CCLKH = 30; // NOTE: must be non zero
}
else if ( CommunicateSpeed_400K == eCommunicateSpeed )
{
I2caRegs.I2CCLKL = 10; // NOTE: must be non zero
I2caRegs.I2CCLKH = 5; // NOTE: must be non zero
}
else
{
printf("Current I2C Communicate Speed Not Support");
}
// Configure Interrupt Source Enable
I2caRegs.I2CIER.all = 0x00; // Disable interrupts
I2caRegs.I2CMDR.all = 0x0020; // Take I2C out of reset
// Stop I2C when suspended
//I2caRegs.I2CMDR.bit.IRS = 1; // Take I2C out of reset
// Stop I2C when suspended
I2caRegs.I2CFFTX.all = 0x0000; // Disable FIFO mode and TXFIFO
I2caRegs.I2CFFRX.all = 0x0000; // Disable RXFIFO, clear RXFFINT,
return;
}
5. I2C写参数
Uint16 WriteData(Uint16 iSlaveAddress,Uint16 *pTxData,Uint16 iTxDataLen)
{
Uint16 i;
// Wait until the STP bit is cleared from any previous master communication.
// Clearing of this bit by the module is delayed until after the SCD bit is
// set. If this bit is not checked prior to initiating a new message, the
// I2C could get confused.
while(I2caRegs.I2CMDR.bit.STP == 1);
// Check if bus busy
while(I2caRegs.I2CSTR.bit.BB == 1);
while(0 == I2caRegs.I2CSTR.bit.XRDY);
I2caRegs.I2CSAR = iSlaveAddress; // Slave address;
I2caRegs.I2CCNT = iTxDataLen;
I2caRegs.I2CDXR = pTxData[0];
I2caRegs.I2CMDR.all = 0x6E20;
for (i=0; i<iTxDataLen-1; i++)
{
printf("\r\n w1 here,I2CMDR:0x%04x,I2CSTR:0x%04x,I2CCNT:0x%04x,I2CDXR:0x%04x",I2caRegs.I2CMDR.all,I2caRegs.I2CSTR.all,I2caRegs.I2CCNT,I2caRegs.I2CDXR);
while(0 == I2caRegs.I2CSTR.bit.XRDY);
I2caRegs.I2CDXR = pTxData[i+1];
if (I2caRegs.I2CSTR.bit.NACK == 1)
{
printf("\r\n w busy here1");
return I2C_BUS_BUSY_ERROR;
}
}
return I2C_SUCCESS;
}
6. I2C读函数
Uint16 ReadData(Uint16 iSlaveAddress,Uint16 *pTxData,Uint16 iTxDataLen,Uint16 *pRxData,Uint16 iRxDataLen)
{
Uint16 i,Temp;
// Wait until the STP bit is cleared from any previous master communication.
// Clearing of this bit by the module is delayed until after the SCD bit is
// set. If this bit is not checked prior to initiating a new message, the
// I2C could get confused.
while(I2caRegs.I2CMDR.bit.STP == 1);
// Check if bus busy
while(I2caRegs.I2CSTR.bit.BB == 1);
I2caRegs.I2CSAR = iSlaveAddress; // Slave address;;
if ( (0 != iTxDataLen) && (NULL != pTxData) ) //判断是否需要在读取前先发送数据
{
while(0 == I2caRegs.I2CSTR.bit.XRDY);
I2caRegs.I2CCNT = iTxDataLen;
I2caRegs.I2CDXR = pTxData[0];
I2caRegs.I2CMDR.all = 0x2620;
if (I2caRegs.I2CSTR.bit.NACK == 1)
{
return I2C_BUS_BUSY_ERROR;
}
for (i=0; i<iTxDataLen-1; i++)
{
while(0 == I2caRegs.I2CSTR.bit.XRDY);
I2caRegs.I2CDXR = pTxData[i+1];
if (I2caRegs.I2CSTR.bit.NACK == 1)
{
return I2C_BUS_BUSY_ERROR;
}
}
DELAY_US(50);
}
printf("\r\n r here1,I2CMDR:0x%04x,I2CSTR:0x%04x",I2caRegs.I2CMDR.all,I2caRegs.I2CSTR.all);
while(0 == I2caRegs.I2CSTR.bit.XRDY); //判断这个是否合适??
// Wait Register-access-ready
//while(I2caRegs.I2CSTR.bit.ARDY == 0); //如果不需要先写入的读取,用这个判断也不合适??
I2caRegs.I2CCNT = iRxDataLen;
I2caRegs.I2CMDR.all = 0x2C20;
if (I2caRegs.I2CSTR.bit.NACK == 1)
{
return I2C_BUS_BUSY_ERROR;
}
for(i=0; i<iRxDataLen; i++)
{
printf("\r\n r here2,I2CMDR:0x%04x,I2CSTR:0x%04x",I2caRegs.I2CMDR.all,I2caRegs.I2CSTR.all);
while(0 == I2caRegs.I2CSTR.bit.RRDY); //卡在这里
Temp = I2caRegs.I2CDRR;
if (I2caRegs.I2CSTR.bit.NACK == 1)
{
return I2C_BUS_BUSY_ERROR;
}
*pRxData = Temp;
pRxData++;
}
return I2C_SUCCESS;
}
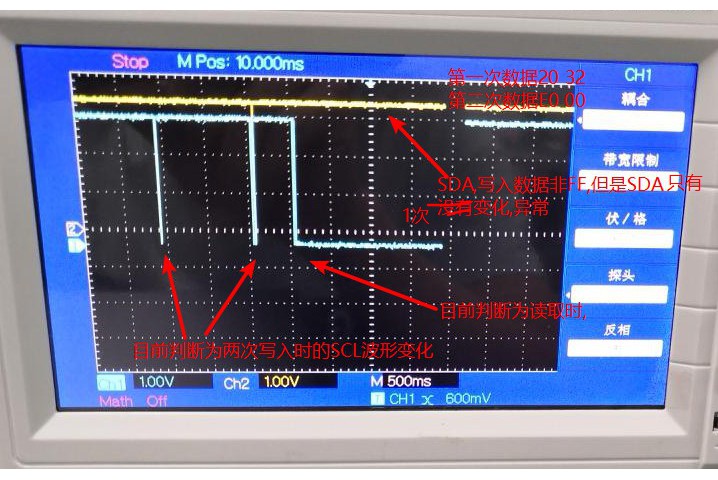
在while(0 == I2caRegs.I2CSTR.bit.RRDY);卡住,程序停止运行了。在其上一句调试信号为 r here2,I2CMDR:0x0c20,I2CSTR:0x3438