
This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
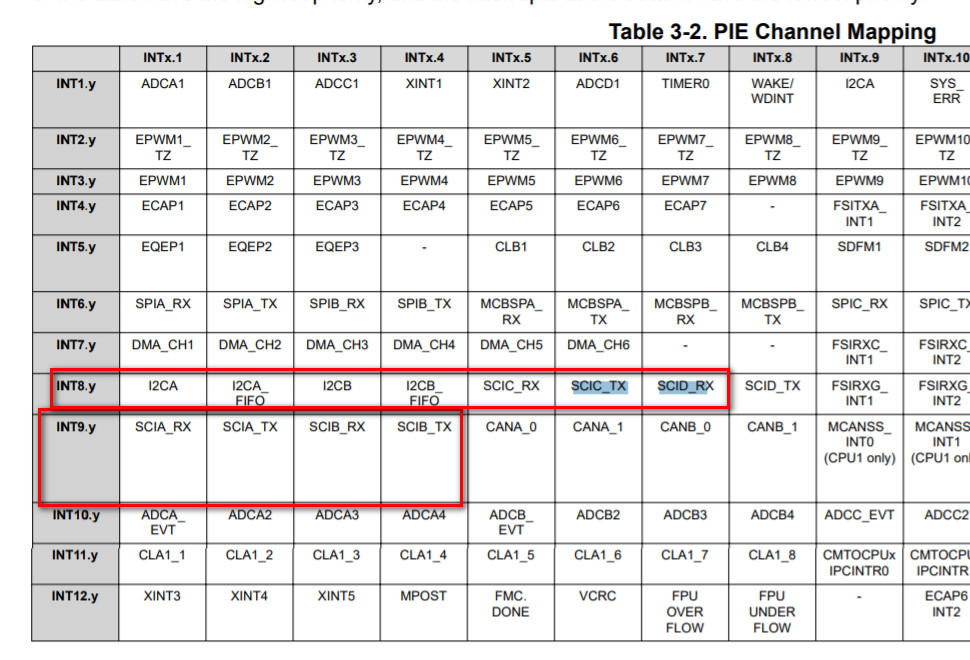
您是否有修改 Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
为
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8);
另外附上我的测试程序,可以成功的
//########################################################################### // // FILE: sci_ex2_loopback_interrupts.c // // TITLE: SCI Digital Loop Back with Interrupts. // //! \addtogroup driver_example_list //! <h1> SCI Digital Loop Back with Interrupts </h1> //! //! This test uses the internal loop back test mode of the peripheral. //! Other then boot mode pin configuration, no other hardware configuration //! is required. Both interrupts and the SCI FIFOs are used. //! //! A stream of data is sent and then compared to the received stream. //! The SCI-A sent data looks like this: \n //! 00 01 \n //! 01 02 \n //! 02 03 \n //! .... \n //! FE FF \n //! FF 00 \n //! etc.. \n //! The pattern is repeated forever. //! //! \b Watch \b Variables \n //! - \b sDataA - Data being sent //! - \b rDataA - Data received //! - \b rDataPointA - Keep track of where we are in the data stream. //! This is used to check the incoming data //! // //########################################################################### // $TI Release: F2838x Support Library v3.04.00.00 $ // $Release Date: Fri Feb 12 19:08:49 IST 2021 $ // $Copyright: // Copyright (C) 2021 Texas Instruments Incorporated - http://www.ti.com/ // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //########################################################################### // // Included Files // #include "driverlib.h" #include "device.h" // // Globals // // // Send data for SCI-A // uint16_t sDataA[2]; // // Received data for SCI-A // uint16_t rDataA[2]; // // Used for checking the received data // uint16_t rDataPointA; // // Function Prototypes // __interrupt void scicTXFIFOISR(void); __interrupt void scicRXFIFOISR(void); void initSCICFIFO(void); void error(void); // // Main // void main(void) { uint16_t i; // // Initialize device clock and peripherals // Device_init(); // // Setup GPIO by disabling pin locks and enabling pullups // Device_initGPIO(); // // GPIO28 is the SCI Rx pin. // GPIO_setMasterCore(39, GPIO_CORE_CPU1); GPIO_setPinConfig(GPIO_39_SCIC_RX); GPIO_setDirectionMode(39, GPIO_DIR_MODE_IN); GPIO_setPadConfig(39, GPIO_PIN_TYPE_STD); GPIO_setQualificationMode(39, GPIO_QUAL_ASYNC); // // GPIO29 is the SCI Tx pin. // GPIO_setMasterCore(38, GPIO_CORE_CPU1); GPIO_setPinConfig(GPIO_38_SCIC_TX); GPIO_setDirectionMode(38, GPIO_DIR_MODE_OUT); GPIO_setPadConfig(38, GPIO_PIN_TYPE_STD); GPIO_setQualificationMode(38, GPIO_QUAL_ASYNC); // // Initialize PIE and clear PIE registers. Disables CPU interrupts. // Interrupt_initModule(); // // Initialize the PIE vector table with pointers to the shell Interrupt // Service Routines (ISR). // Interrupt_initVectorTable(); // // Interrupts that are used in this example are re-mapped to // ISR functions found within this file. // Interrupt_register(INT_SCIC_RX, scicRXFIFOISR); Interrupt_register(INT_SCIC_TX, scicTXFIFOISR); // // Initialize the Device Peripherals: // initSCICFIFO(); // // Init the send data. After each transmission this data // will be updated for the next transmission // for(i = 0; i < 2; i++) { sDataA[i] = i; } rDataPointA = sDataA[0]; Interrupt_enable(INT_SCIC_RX); Interrupt_enable(INT_SCIC_TX); Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8); // // Enable Global Interrupt (INTM) and realtime interrupt (DBGM) // EINT; ERTM; // // IDLE loop. Just sit and loop forever (optional): // for(;;); } // // error - Function to halt debugger on error // void error(void) { asm(" ESTOP0"); // Test failed!! Stop! for (;;); } // // sciaTXFIFOISR - SCIA Transmit FIFO ISR // __interrupt void scicTXFIFOISR(void) { uint16_t i; SCI_writeCharArray(SCIC_BASE, sDataA, 2); // // Increment send data for next cycle // for(i = 0; i < 2; i++) { sDataA[i] = (sDataA[i] + 1) & 0x00FF; } SCI_clearInterruptStatus(SCIC_BASE, SCI_INT_TXFF); // // Issue PIE ACK // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8); } // // sciaRXFIFOISR - SCIA Receive FIFO ISR // __interrupt void scicRXFIFOISR(void) { uint16_t i; SCI_readCharArray(SCIC_BASE, rDataA, 2); // // Check received data // for(i = 0; i < 2; i++) { if(rDataA[i] != ((rDataPointA + i) & 0x00FF)) { error(); } } rDataPointA = (rDataPointA + 1) & 0x00FF; SCI_clearOverflowStatus(SCIC_BASE); SCI_clearInterruptStatus(SCIC_BASE, SCI_INT_RXFF); // // Issue PIE ack // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP8); } // // initSCIAFIFO - Configure SCIA FIFO // void initSCICFIFO() { // // 8 char bits, 1 stop bit, no parity. Baud rate is 9600. // SCI_setConfig(SCIC_BASE, DEVICE_LSPCLK_FREQ, 9600, (SCI_CONFIG_WLEN_8 | SCI_CONFIG_STOP_ONE | SCI_CONFIG_PAR_NONE)); SCI_enableModule(SCIC_BASE); SCI_enableLoopback(SCIC_BASE); SCI_resetChannels(SCIC_BASE); SCI_enableFIFO(SCIC_BASE); // // RX and TX FIFO Interrupts Enabled // SCI_enableInterrupt(SCIC_BASE, (SCI_INT_RXFF | SCI_INT_TXFF)); SCI_disableInterrupt(SCIC_BASE, SCI_INT_RXERR); // // The transmit FIFO generates an interrupt when FIFO status // bits are less than or equal to 2 out of 16 words // The receive FIFO generates an interrupt when FIFO status // bits are greater than equal to 2 out of 16 words // SCI_setFIFOInterruptLevel(SCIC_BASE, SCI_FIFO_TX2, SCI_FIFO_RX2); SCI_performSoftwareReset(SCIC_BASE); SCI_resetTxFIFO(SCIC_BASE); SCI_resetRxFIFO(SCIC_BASE); } // // End of file //

