Part Number: TMS320F280039C
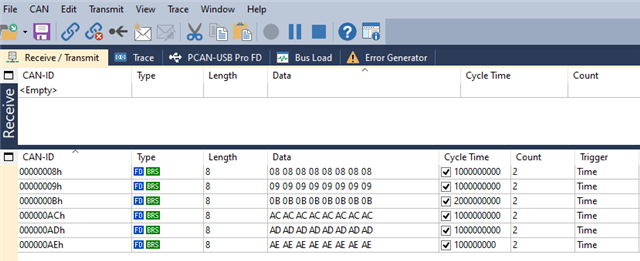
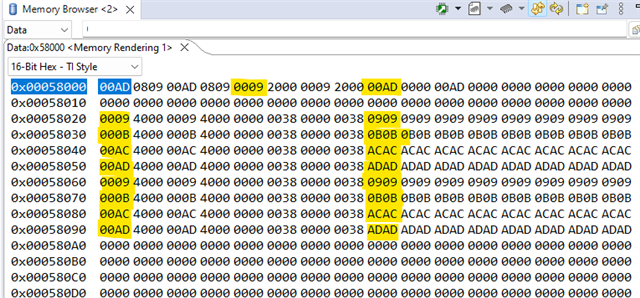
你好,我在配置280039C芯片的MCAN的过滤器时,发现第一个过滤器的sfid2无法正常工作,请问是什么原因呢?具体配置如下:
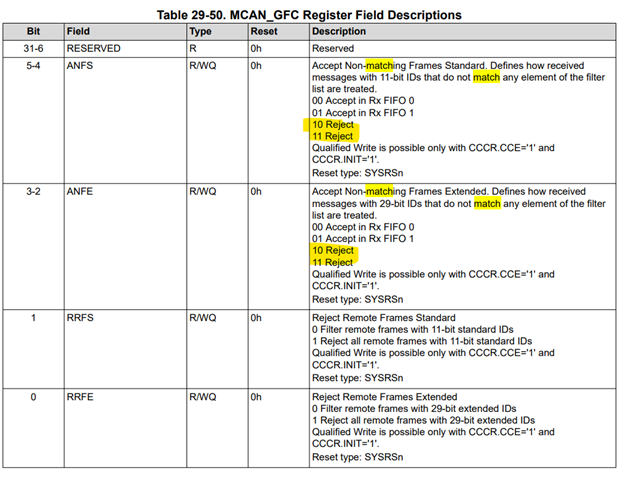
ConfigParams.filterConfig.anfs = 2U;
MCAN_config(MCANA_DRIVER_BASE, &ConfigParams );
StdFilterElement.sfid1 = 0x009U;
StdFilterElement.sfid2 = 0x0ADU;
StdFilterElement.sfec = 1U;
StdFilterElement.sft = 1U;
MCAN_addStdMsgIDFilter(MCANA_DRIVER_BASE, 0U, &StdFilterElement);
配置如上,sfid1正常工作,但是sfid2无法工作,请问是什么原因呢