Part Number: LAUNCHXL-CC26X2R1
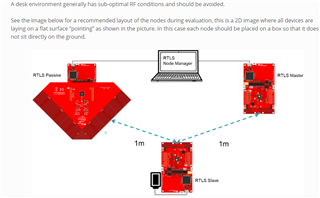
就是目前master、passive和slave 这三个板子之间最远距离可以放多远?
角度是0° 、90°的分别是哪些位置?要怎么分辨 因为移动slave 角度跳动的很厉害 没有规律,绕天线板一圈都没看到有200°以上的角度
Original question:

Part Number: LAUNCHXL-CC26X2R1
就是目前master、passive和slave 这三个板子之间最远距离可以放多远?
角度是0° 、90°的分别是哪些位置?要怎么分辨 因为移动slave 角度跳动的很厉害 没有规律,绕天线板一圈都没看到有200°以上的角度