

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F2.8377万S 主题中讨论的其他部件:REF3030, OPA2227
C2000团队,
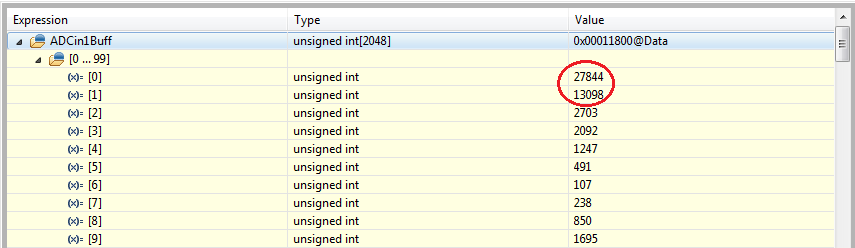
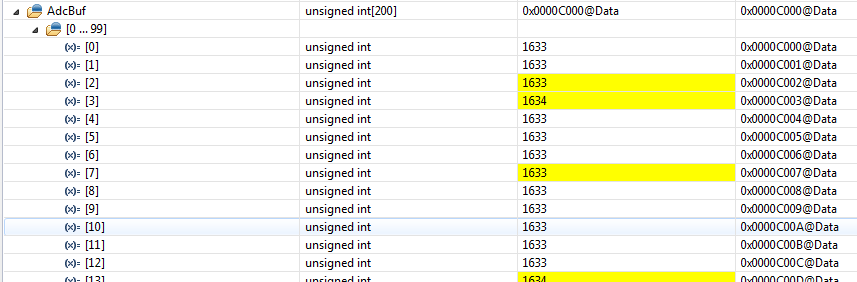
我在F2.8377万S Launchpad上以 12位模式运行ADC-A,由ePWM以50 kHz速率触发,采集窗口为100 ns (20个周期@ 200 MHz SYSCLK)。 我正在使用CPU来获取单个50点数据缓冲区。 缓冲50个点后,在ISR中禁用ADC中断,因此我 不再缓冲点。 转换在ADCINA0通道上。
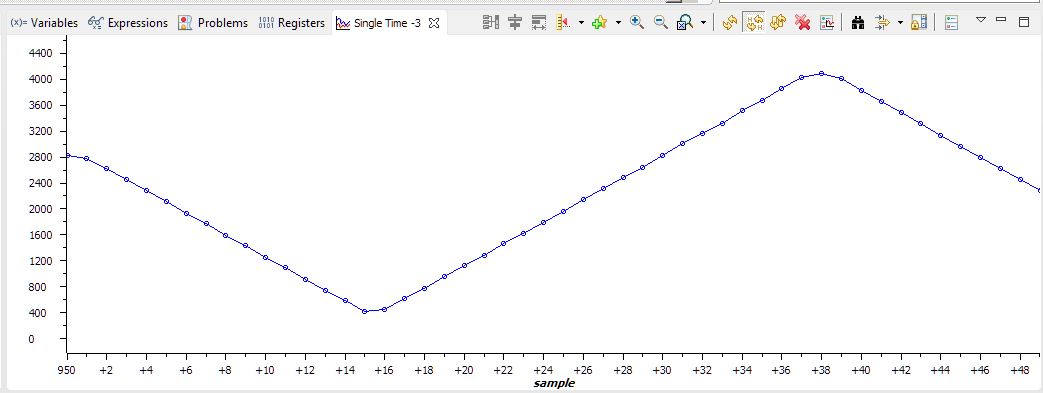
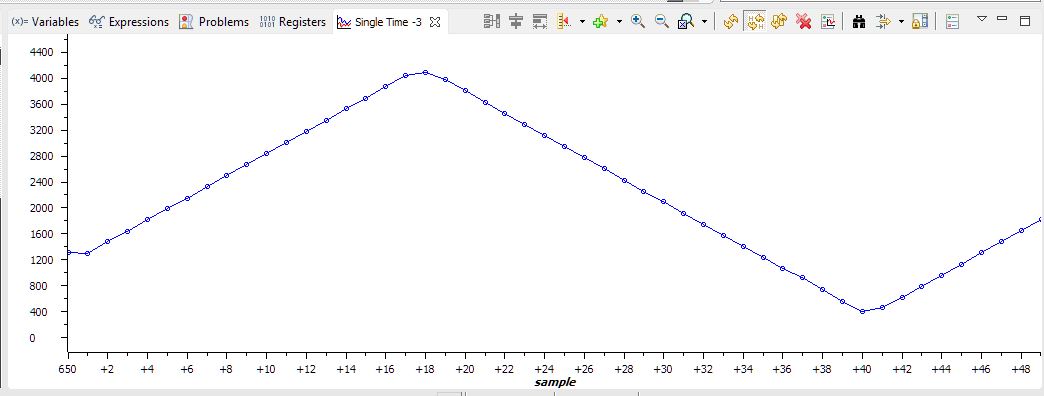
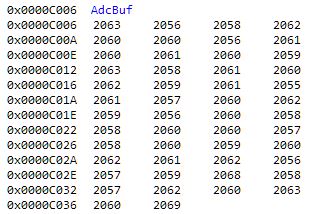
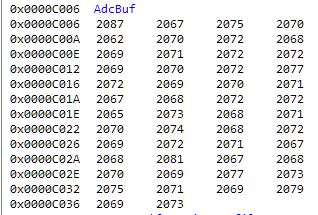
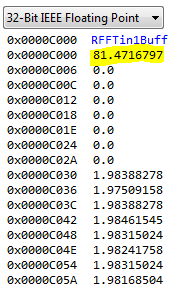
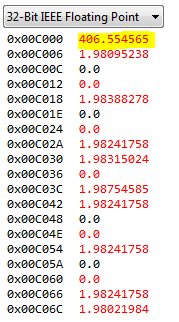
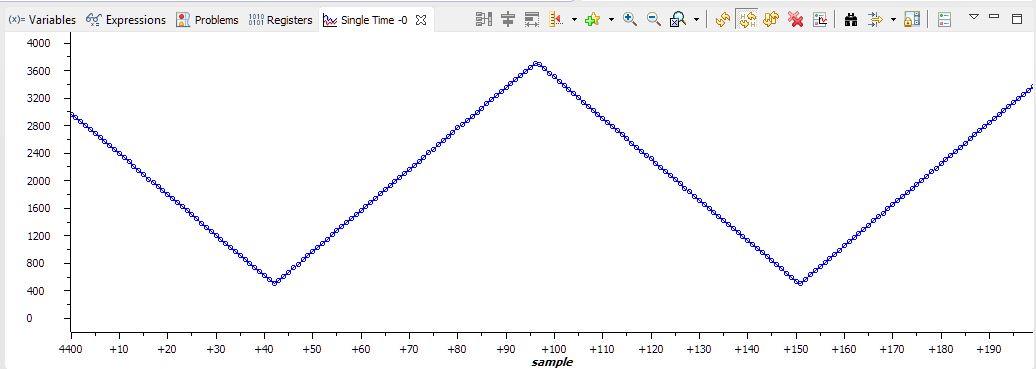
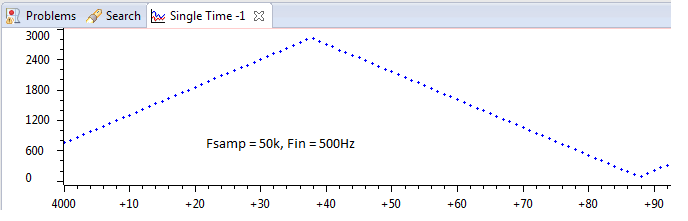
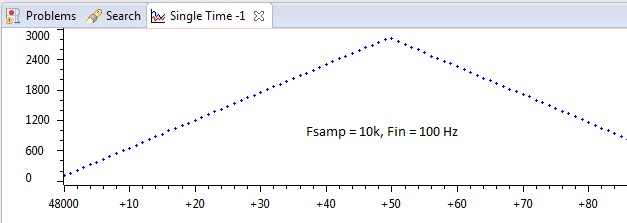
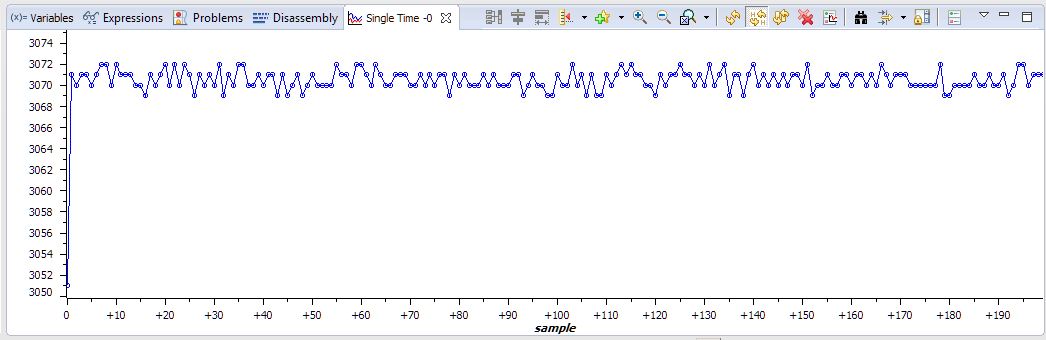
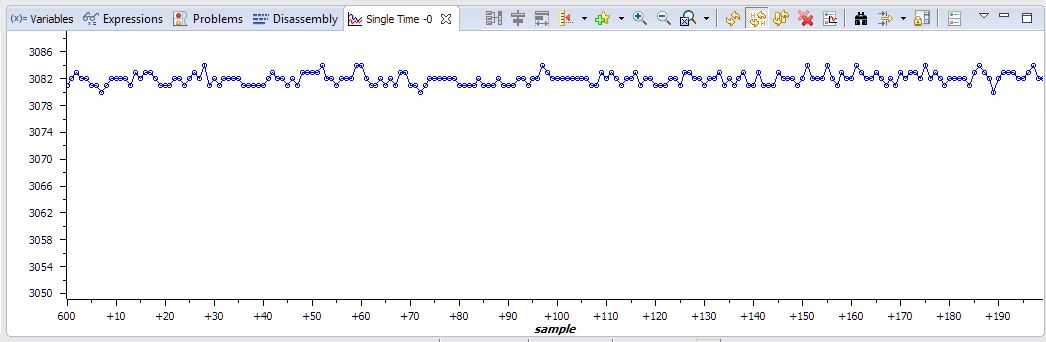
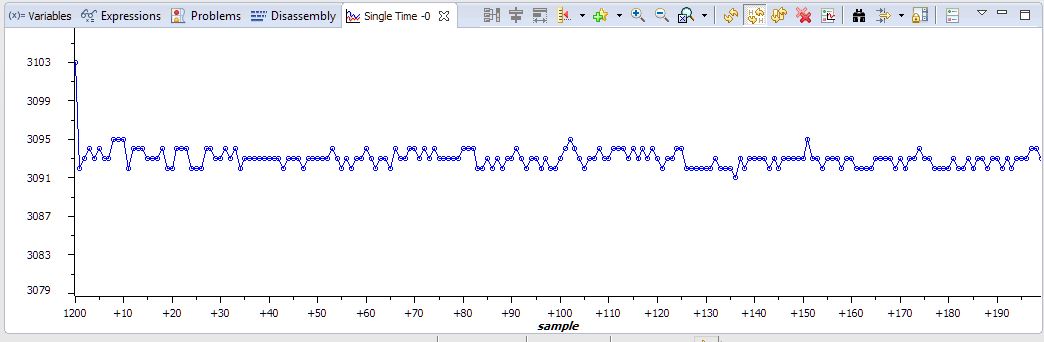
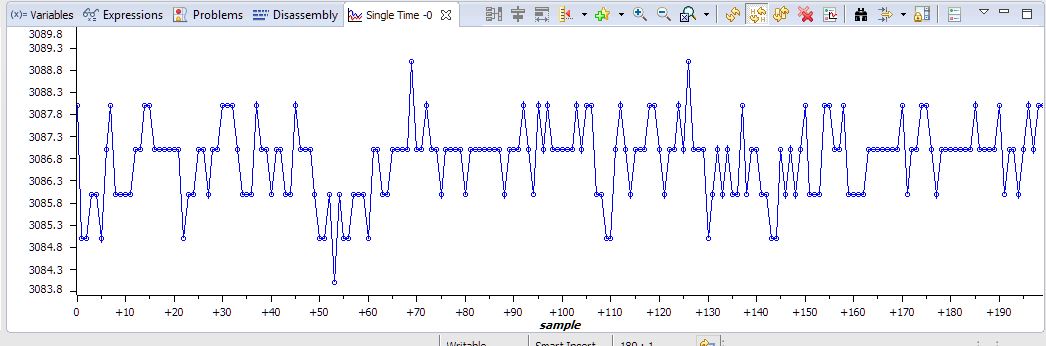
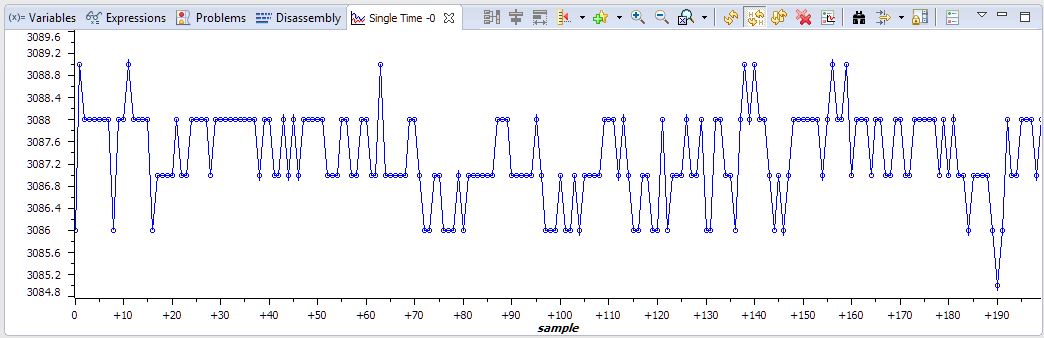
问题就在第一点。 请参见下图。 输入是一个1 kHz的三角形波,从大约0.2 到3.1V。 第一个点总是稍微偏离。 您可以在下面的CCS图中看到它。
我在启用ADC后添加了附加延迟,然后使用ePWM触发ADC。 没有区别。
我尝试了另一个信号发生器,认为这可能是输入的某种负载问题。 没有区别。
我尝试了另一个ADC (ADC-B)。 没有区别。
我将采集窗口增加了一倍,达到200 ns。 没有区别。
我查看了勘误表,没有看到关于第一个示例错误的任何信息。
现在,我使用TMX芯片(修订版B),但这似乎不是问题。 所有其他样本均正常(存在一些明显偏移误差)。
有什么想法 可能导致这种情况?
谢谢,此致,
David
















{kind=link}