主题中讨论的其他器件:TMDSHSECDOCK、 C2000WARE、SysConfig、 LAUNCHXL-F280049C
您好!
我正在尝试 完成与此处所述内容类似的内容: 将 PWM 与外部信号同步- TI Hercules 微控制器 (请查看 此 链接的视频以了解其功能)。
这篇文章背后的主要思想是 将 PWM 与外部信号同步 在这里、每次控制信号有一个上升沿时、PWM 信号被复位。 该实施是通过另一个 TI 微控制器完成的、因此我想它也可以通过 F28004x C2000微控制器系列实现。 在本例中、 我将随 TMDSHSECDOCK 一起使用 TMS320F280049C 控制卡。
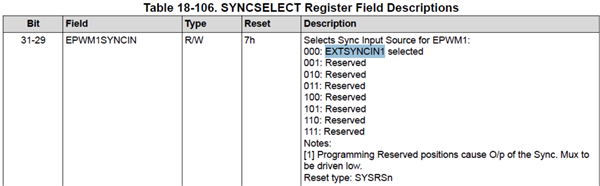
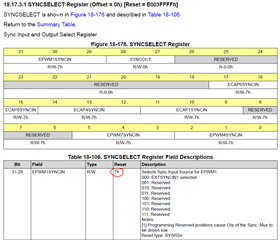
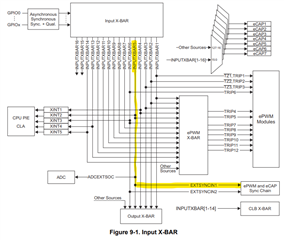
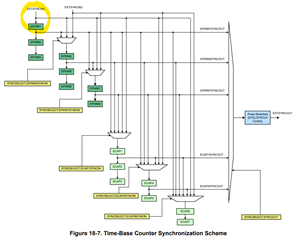
TMS320F28004x 实时微控制器技术参考手册 解释了 ePWM 可以与 EXTSYNCINx 同步、因此外部 SYNC 信号应通过 INPUTXBAR5和/或 INPUTXBAR6直接路由、以提供与 ePWM 和 eCAP 同步链的同步。
为了测试这一概念、我采用了 CCS 参考 示例 epwm_ex3_synchronization.projectspec (位于 C2000Ware_5_00_00_00\driverlib\f28004x\examples\EPWM)并进行了一些修改、使测试非常简单。 因此、我考虑了以下简单场景:
输入 GPIO39 * > INPUTXBAR5 > EXTSYNCIN1 > ePWM1 > GPIO0 (PWM1A)和 GPIO1 (PWM1B)输出
* 向 GPIO39施加外部方波信号(2V 振幅、50%占空比和100Hz)
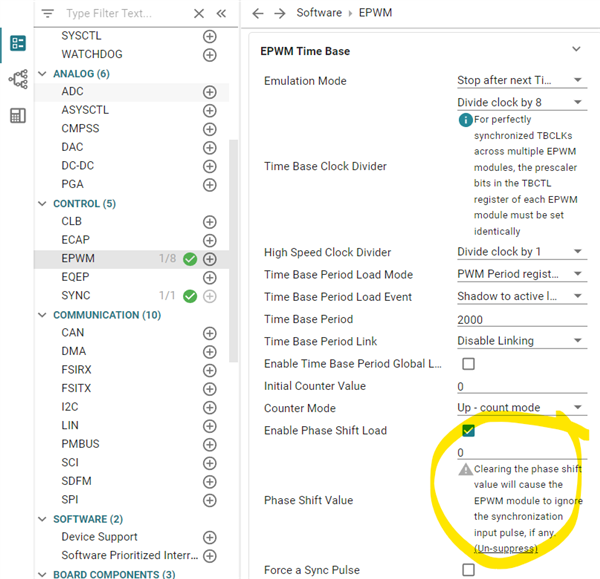
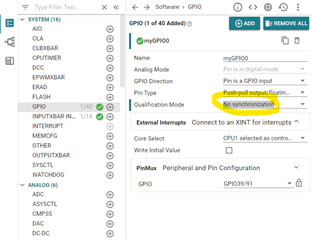
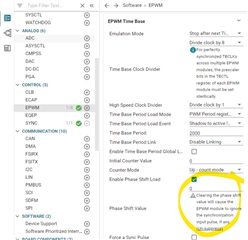
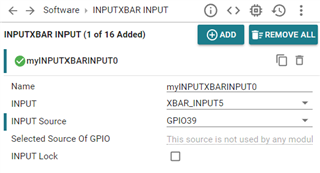
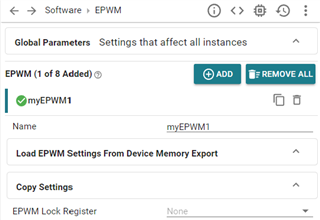
最后的.c 代码在下面分享、在这里、我唯一的贡献是评论与 ePWM2、3和4相关的行、我不打算使用这些行。 下面对.syscfg 代码也进行了小幅修改、其中我将 XBAR 输入5更改为 GPIO39并删除了 myINPUTXBARINPUT1 (XBAR_INPUT6)、下面的屏幕截图 显示了最终配置。 此外、我删除了 myEPWM2、3和4、以下屏幕截图 显示了最终配置。 不会对原始示例应用进一步的更改。
//############################################################################# // // FILE: epwm_ex3_synchronization.c // // TITLE: ePWM Using The Synch Chain and Phase Shift. // //! \addtogroup driver_example_list //! <h1>ePWM Synchronization</h1> //! //! This example configures ePWM1, ePWM2, ePWM3 and ePWM4 as follows //! - ePWM1 without phase shift as sync source //! - ePWM2 with phase shift of 300 TBCLKs //! - ePWM3 with phase shift of 600 TBCLKs //! - ePWM4 with phase shift of 900 TBCLKs //! //! \b External \b Connections \n //! - GPIO0 EPWM1A //! - GPIO1 EPWM1B //! - GPIO2 EPWM2A //! - GPIO3 EPWM2B //! - GPIO4 EPWM3A //! - GPIO5 EPWM3B //! - GPIO6 EPWM4A //! - GPIO7 EPWM4B //! //! \b Watch \b Variables \n //! - None. // //############################################################################# // // // $Copyright: // Copyright (C) 2023 Texas Instruments Incorporated - http://www.ti.com/ // // Redistribution and use in source and binary forms, with or without // modification, are permitted provided that the following conditions // are met: // // Redistributions of source code must retain the above copyright // notice, this list of conditions and the following disclaimer. // // Redistributions in binary form must reproduce the above copyright // notice, this list of conditions and the following disclaimer in the // documentation and/or other materials provided with the // distribution. // // Neither the name of Texas Instruments Incorporated nor the names of // its contributors may be used to endorse or promote products derived // from this software without specific prior written permission. // // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS // "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT // LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR // A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT // OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT // LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, // DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY // THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT // (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE // OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. // $ //############################################################################# // // Included Files // #include "driverlib.h" #include "device.h" #include "board.h" __interrupt void epwm1ISR(void); __interrupt void epwm2ISR(void); __interrupt void epwm3ISR(void); __interrupt void epwm4ISR(void); // // Main // void main(void) { // // Initialize device clock and peripherals // Device_init(); // // Disable pin locks and enable internal pull ups. // Device_initGPIO(); // // Initialize PIE and clear PIE registers. Disables CPU interrupts. // Interrupt_initModule(); // // Initialize the PIE vector table with pointers to the shell Interrupt // Service Routines (ISR). // Interrupt_initVectorTable(); // // Assign the interrupt service routines to ePWM interrupts // Interrupt_register(INT_EPWM1, &epwm1ISR); //Interrupt_register(INT_EPWM2, &epwm2ISR); //Interrupt_register(INT_EPWM3, &epwm3ISR); //Interrupt_register(INT_EPWM4, &epwm4ISR); // Disable sync(Freeze clock to PWM as well). GTBCLKSYNC is applicable // only for multiple core devices. Uncomment the below statement if // applicable. // // SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_GTBCLKSYNC); SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC); // // Configure GPIO0/1 , GPIO2/3 and GPIO4/5 and GPIO6/7 as // ePWM1A/1B, ePWM2A/2B, ePWM3A/3B, ePWM4A/4B pins respectively // Configure EPWM Modules // Board_init(); // // Enable sync and clock to PWM // SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC); // // Enable ePWM interrupts // Interrupt_enable(INT_EPWM1); //Interrupt_enable(INT_EPWM2); //Interrupt_enable(INT_EPWM3); //Interrupt_enable(INT_EPWM4); // // Enable Global Interrupt (INTM) and realtime interrupt (DBGM) // EINT; ERTM; // // IDLE loop. Just sit and loop forever (optional): // for(;;) { } } // // epwm1ISR - ePWM 1 ISR // __interrupt void epwm1ISR(void) { // // Clear INT flag for this timer // EPWM_clearEventTriggerInterruptFlag(myEPWM1_BASE); // // Acknowledge interrupt group // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP3); } // // epwm2ISR - ePWM 2 ISR // /*__interrupt void epwm2ISR(void) { // // Clear INT flag for this timer // EPWM_clearEventTriggerInterruptFlag(myEPWM2_BASE); // // Acknowledge interrupt group // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP3); } // // epwm3ISR - ePWM 3 ISR // __interrupt void epwm3ISR(void) { // // Clear INT flag for this timer // EPWM_clearEventTriggerInterruptFlag(myEPWM3_BASE); // // Acknowledge interrupt group // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP3); } // // epwm4ISR - ePWM 4 ISR // __interrupt void epwm4ISR(void) { // // Clear INT flag for this timer // EPWM_clearEventTriggerInterruptFlag(myEPWM4_BASE); // // Acknowledge interrupt group // Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP3); }*/
/**
* These arguments were used when this file was generated. They will be automatically applied on subsequent loads
* via the GUI or CLI. Run CLI with '--help' for additional information on how to override these arguments.
* @cliArgs --device "F28004x" --package "F28004x_100PZ" --part "F28004x_100PZ" --context "system" --product "C2000WARE@5.00.00.00"
* @versions {"tool":"1.18.0+3266"}
*/
/**
* Import the modules used in this configuration.
*/
const epwm = scripting.addModule("/driverlib/epwm.js", {}, false);
const epwm1 = epwm.addInstance();
const inputxbar = scripting.addModule("/driverlib/inputxbar.js", {}, false);
const inputxbar1 = inputxbar.addInstance();
const inputxbar_input = scripting.addModule("/driverlib/inputxbar_input.js");
const inputxbar_input1 = inputxbar_input.addInstance();
const sync = scripting.addModule("/driverlib/sync.js");
/**
* Write custom configuration values to the imported modules.
*/
epwm1.$name = "myEPWM1";
epwm1.epwmTimebase_period = 2000;
epwm1.epwmCounterCompare_cmpA = 1000;
epwm1.epwmCounterCompare_cmpB = 500;
epwm1.epwmTimebase_counterMode = "EPWM_COUNTER_MODE_UP";
epwm1.epwmTimebase_clockDiv = "EPWM_CLOCK_DIVIDER_8";
epwm1.epwmTimebase_hsClockDiv = "EPWM_HSCLOCK_DIVIDER_1";
epwm1.epwmActionQualifier_EPWM_AQ_OUTPUT_A_ON_TIMEBASE_ZERO = "EPWM_AQ_OUTPUT_HIGH";
epwm1.epwmActionQualifier_EPWM_AQ_OUTPUT_B_ON_TIMEBASE_ZERO = "EPWM_AQ_OUTPUT_HIGH";
epwm1.epwmActionQualifier_EPWM_AQ_OUTPUT_A_ON_TIMEBASE_UP_CMPA = "EPWM_AQ_OUTPUT_LOW";
epwm1.epwmActionQualifier_EPWM_AQ_OUTPUT_B_ON_TIMEBASE_UP_CMPB = "EPWM_AQ_OUTPUT_LOW";
epwm1.epwmEventTrigger_enableInterrupt = true;
epwm1.epwmEventTrigger_interruptEventCount = "1";
epwm1.epwmTimebase_syncOutPulseMode = "EPWM_SYNC_OUT_PULSE_ON_COUNTER_ZERO";
epwm1.epwm.$assign = "EPWM1";
epwm1.epwm.epwm_aPin.$assign = "GPIO0";
epwm1.epwm.epwm_bPin.$assign = "GPIO1";
inputxbar1.$name = "myINPUTXBAR5";
inputxbar_input1.$name = "myINPUTXBARINPUT0";
inputxbar_input1.inputxbarInput = "XBAR_INPUT5";
inputxbar_input1.inputxbarGpio = "GPIO39";
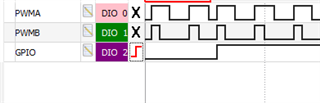
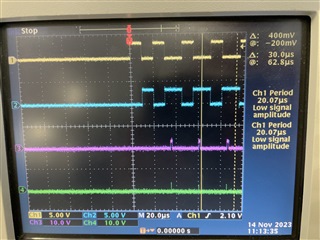
加载代码后、我无法在 GPIO39输入的上升沿看到任何同步。 在帖子的底部 、我附加了一个.ZIP 格式的视频进行测试、您可以 从示波器上看到配置和结果。 黄色显示 GPIO39外部控制信号、蓝色和粉色显示 GPIO0 (PWM1A)和 GPIO1 (PWM1B)
在该示例中、使 PWM 同步可能缺少什么? 为什么 PWM1A 和 PWM1B 不互补?
等待您的答案。
此致、
D·奥维西延科
此处的视频- e2e.ti.com/.../VideoTest.zip