Other Parts Discussed in Thread: MSP430FR2433
Hi TI team:
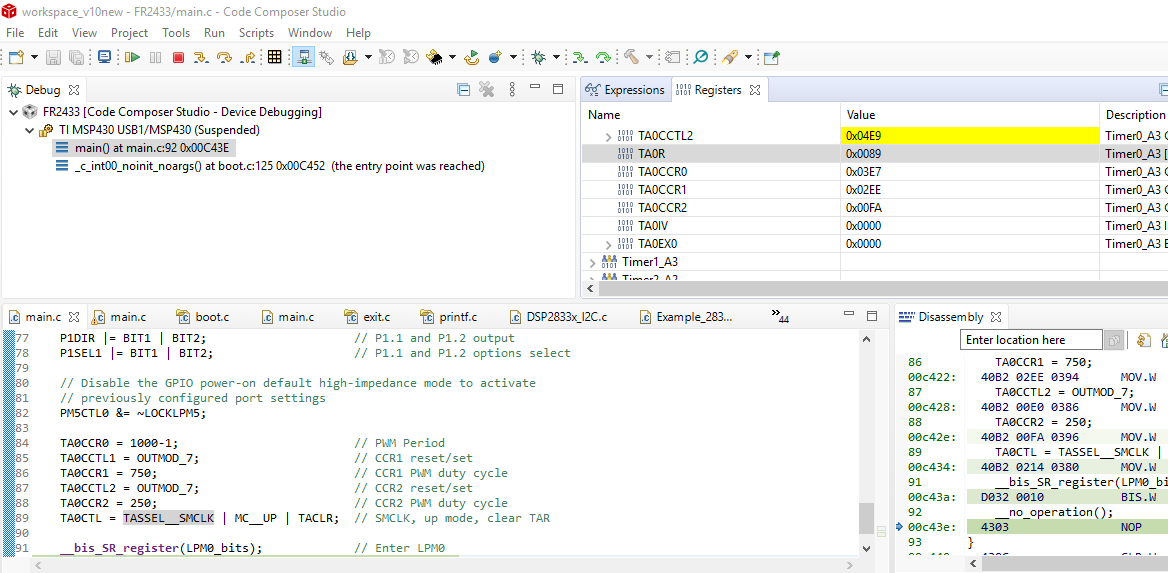
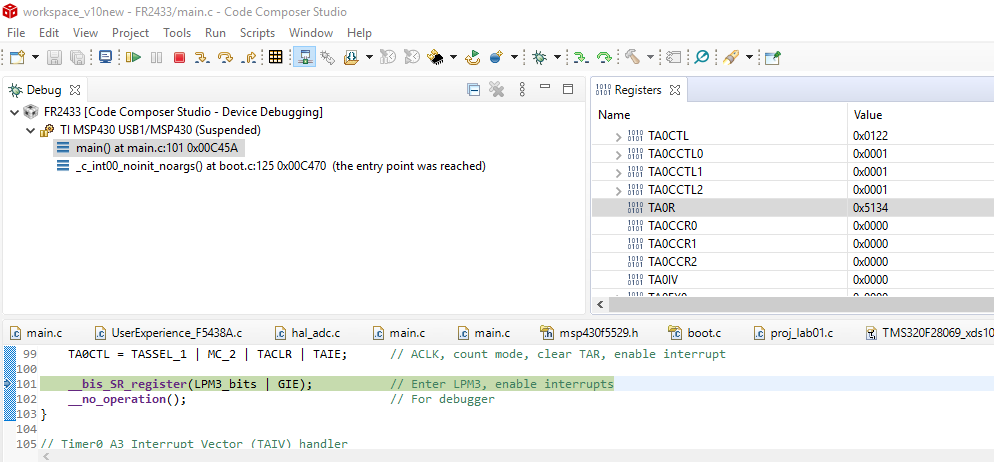
1、在使用MSP430FR2433的TA0R不计数,发现如果执行延时函数,TA0R能够正常计时,但是其他的语句无法让TA0R计时;
2、想了解下在主频配置或者定时器初始化有什么不一样的地方?现在用的是16M主频,对输入时钟进行了8分频,8s中断唤醒一次
3、又测试发现如果定时器时钟源选择ACLK只有经过延时函数定时器可以正常计时,其他语句指令不计时,时钟源选择SMCLK时,所有指令都可以正常计时。附件是测试程序。
main()
{
_DINT();
WDTCTL = WDTPW | WDTHOLD;
PortInit();
Ucs_Init_16M();
// Ucs_Init_1M();
TimerA0CounterSetup();
while(1)
{
__bis_SR_register(LPM3_bits | GIE); // Enter LPM3
WDTCTL = WDTPW | WDTCNTCL | WDTSSEL0_L | WDTIS_2;
UCA1IE |= UCRXIE;
APP_RTCPro_Delay_ms(2);
uiTranceiver=TA0R;
do
{
__bis_SR_register(LPM3_bits | GIE); // Enter LPM3
if(TA0R>=uiTranceiver)uiTemp=TA0R;
else uiTemp=TA0R+0x8000;
if((uiTemp-uiTranceiver)> T50ms) //400ms
{
P1OUT |= BIT3;
P3OUT |=BIT3;;
break;
}
}while((uiTemp-uiTranceiver)<(T200ms+T200ms));
P1OUT |= BIT3;
UCA1IE &= ~UCRXIE;
}
}
void Ucs_Init_16M(void)
{
FRCTL0 = FRCTLPW | NWAITS_1;
P2SEL0 |= BIT0 | BIT1;
do
{
CSCTL7 &= ~(XT1OFFG | DCOFFG); // Clear XT1 and DCO fault flag
SFRIFG1 &= ~OFIFG;
} while (SFRIFG1 & OFIFG); // Test oscillator fault flag
__bis_SR_register(SCG0); // disable FLL
CSCTL3 |= SELREF__XT1CLK;
CSCTL0 = 0; // clear DCO and MOD registers
CSCTL1 &= ~(DCORSEL_7); // Clear DCO frequency select bits first
CSCTL1 |= DCORSEL_5; // Set DCO = 16MHz
CSCTL2 = FLLD_0 + 487; // DCOCLKDIV = 16MHz
__delay_cycles(3);
__bic_SR_register(SCG0); // enable FLL
while(CSCTL7 & (FLLUNLOCK0 | FLLUNLOCK1)); // FLL locked
CSCTL4 = SELMS__DCOCLKDIV | SELA__XT1CLK; // MCLK=SMCLK=DCO; ACLK=XT1
PM5CTL0 &= ~LOCKLPM5;
}
void TimerA0CounterSetup(void)
{
TA0CCTL0 |= CCIE; // CCR0 interrupt enabled
TA0CCR0 = 0x8000;
TA0CTL = TASSEL_1 | TACLR | ID_3 | MC_1; // ACLK, clear TAR,8��Ƶ��Up to CCR0
}