Other Parts Discussed in Thread: MSP430F5529
各位先進好
F5419A 有4個UART PORT.
使用XT2 (8MHZ) 做為CLOCK SOURCE.
單獨使用 UART0.UART2,UART3通訊115200bps 都正常
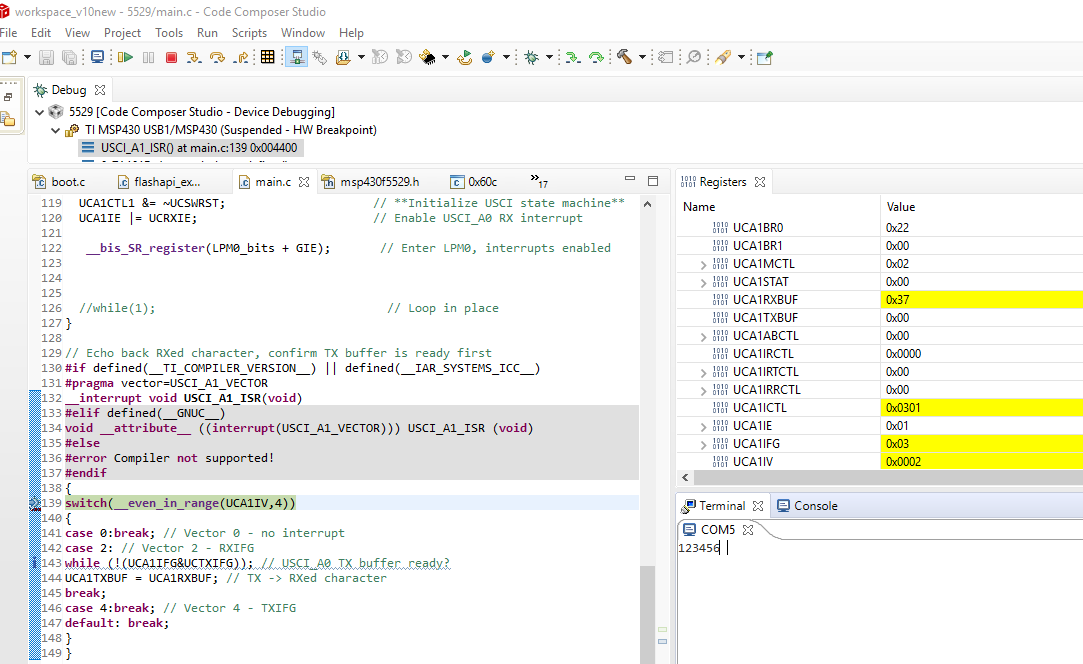
一旦啟用UART1, 全部UART失效.
且 P11.2 輸出從8MHZ 變1MHZ?
請問 先進 是否有建議 ??000_UART1_FAIL_XT2.pdf
//******************************************************************************
// MSP430F543xA Demo - USCI_A0, 115200 UART Echo ISR, DCO SMCLK
//
// Description: Echo a received character, RX ISR used. Normal mode is LPM0.
// USCI_A0 RX interrupt triggers TX Echo.
// Baud rate divider with 1048576hz = 1048576/115200 = ~9.1 (009h|01h)
// ACLK = REFO = ~32768Hz, MCLK = SMCLK = default DCO = 32 x ACLK = 1048576Hz
// See User Guide for baud rate divider table
//
// MSP430F5438A
// -----------------
// /|\| |
// | | |
// --|RST |
// | |
// | P3.4/UCA0TXD|------------>
// | | 115200 - 8N1
// | P3.5/UCA0RXD|<------------
//
// M. Morales
// Texas Instruments Inc.
// June 2009
// Built with CCE Version: 3.2.2 and IAR Embedded Workbench Version: 4.11B
//******************************************************************************
// UART0~UART3 �P�ɱҰ� . �̧ǭӧO��X ���\
#include <msp430.h>
#define PUMP P1OUT ^= 0x01 //BUZ �w��DOG
unsigned int KI;
void SetVcoreUp (unsigned int level);
int main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
P11DIR |= 0x07; // ACLK, MCLK, SMCLK set out to pins
P11SEL |= 0x07; // P11.0,1,2=8MHZ
//===========================STEP 2 ===============================
SetVcoreUp(PMMCOREV_1);
SetVcoreUp(PMMCOREV_2); // Set VCore to 1.8MHz for 20MHz
P5SEL |= 0x0C; // ###### Port select XT2
UCSCTL6 &= ~XT2OFF; // ###### Enable XT2 #################
UCSCTL3 |= SELREF_2; // FLLref = REFO Since LFXT1 is not used,
// sourcing FLL with LFXT1 can cause XT1OFFG flag to set
UCSCTL4 |= SELA_2; // ACLK=REFO,SMCLK=DCO,MCLK=DCO
// Loop until XT1,XT2 & DCO stabilizes
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + XT1HFOFFG + DCOFFG);
// Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
//UCSCTL6 &= ~XT2DRIVE0; // Decrease XT2 Drive according to
PUMP; // expected frequency
//�ʥH�U�T�� �L�k����...........
for(KI=0;KI<50000;KI++){ //�]��í�w�ɶ�����. �ɭPSMCLK ��������
PUMP;
PUMP;
//�ҥH�W�[��LOOP. �Y�i�bXT2 í�w��.�~�ií�w����SMCLK=MCLK=XT2
}
// %%% ���B�i�H�M�w SMCLK�PMCLK �W�v=10MHZ �� 1MHZ %%%
//UCSCTL4 |= SELS_5 + SELM_5; // SMCLK=XT2=8MHZ MCLK=10MHZ �i�H�ߧY����P1.1 ��X�g��=1.6us
UCSCTL4 |= SELS_5; // SMCLK=XT2=8MHZ MCLK=1MHZ �i�H�ߧY����P1.1 ��X�g��=16us
PUMP;
for(KI=0;KI<50000;KI++){ //�]��í�w�ɶ�����. �ɭPSMCLK ��������
PUMP;
PUMP;
//�ҥH�W�[��LOOP. �Y�i�bXT2 í�w��.�~�ií�w����SMCLK=MCLK=XT2
}
//
P3SEL = 0x30; // P3.4,5 = USCI_A0 TXD/RXD
UCA0CTL1 |= UCSWRST; // **Put state machine in reset**
UCA0CTL1 |= UCSSEL_2; // SMCLK
UCA0BR0 = 69; // 1MHz 115200 (see User's Guide)
UCA0BR1 = 0; // 1MHz 115200
UCA0MCTL |= UCBRS_1 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0
UCA0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
/*
//
P5SEL = 0xC0; // P5 = USCI_A1 TXD/RXD
UCA1CTL1 |= UCSWRST; // **Put state machine in reset**
UCA1CTL1 |= UCSSEL_2; // SMCLK
UCA1BR0 = 69; // 1MHz 115200 (see User's Guide)
UCA1BR1 = 0; // 1MHz 115200
UCA1MCTL |= UCBRS_1 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0
UCA1CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
*/
//
P9SEL = 0x30; // P9 = USCI_A2 TXD/RXD
UCA2CTL1 |= UCSWRST; // **Put state machine in reset**
UCA2CTL1 |= UCSSEL_2; // SMCLK
UCA2BR0 = 69; // 1MHz 115200 (see User's Guide)
UCA2BR1 = 0; // 1MHz 115200
UCA2MCTL |= UCBRS_1 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0
UCA2CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
//
P10SEL = 0x30; // P10 = USCI_A3 TXD/RXD
UCA3CTL1 |= UCSWRST; // **Put state machine in reset**
UCA3CTL1 |= UCSSEL_2; // SMCLK
UCA3BR0 = 69; // 1MHz 115200 (see User's Guide)
UCA3BR1 = 0; // 1MHz 115200
UCA3MCTL |= UCBRS_1 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0
UCA3CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
while(1){
while(!(UCA0IFG & UCTXIFG)); //���� UART ��X�\��
UCA0TXBUF=0x41; //���� UART ��X�\��
while(!(UCA1IFG & UCTXIFG)); //���� UART ��X�\��
UCA1TXBUF=0x42; //���� UART ��X�\��
while(!(UCA2IFG & UCTXIFG)); //���� UART ��X�\��
UCA2TXBUF=0x43; //���� UART ��X�\��
while(!(UCA3IFG & UCTXIFG)); //���� UART ��X�\��
UCA3TXBUF=0x44; //���� UART ��X�\��
__delay_cycles(1000000); //���� UART ��X�\��
}
}
void SetVcoreUp (unsigned int level) {
// Open PMM registers for write
PMMCTL0_H = PMMPW_H;
// Set SVS/SVM high side new level
SVSMHCTL = SVSHE + SVSHRVL0 * level + SVMHE + SVSMHRRL0 * level;
// Set SVM low side to new level
SVSMLCTL = SVSLE + SVMLE + SVSMLRRL0 * level;
// Wait till SVM is settled
while ((PMMIFG & SVSMLDLYIFG) == 0);
// Clear already set flags
PMMIFG &= ~(SVMLVLRIFG + SVMLIFG);
// Set VCore to new level
PMMCTL0_L = PMMCOREV0 * level;
// Wait till new level reached
if ((PMMIFG & SVMLIFG))
while ((PMMIFG & SVMLVLRIFG) == 0);
// Set SVS/SVM low side to new level
SVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level;
// Lock PMM registers for write access
PMMCTL0_H = 0x00;
}